剛上高一的高中牲隨便做了點東西,想請各位hxdm提點意見,發了幾個論壇了,感覺有很多有用的建議,謝謝大家啦!!!
智能電子快遞面單系統
一、引言
1、發現並提出問題
隨着電商的快速發展,也極大的帶動了物流的發展,逛淘寶,網購,取快遞,這些已經成爲我們的日常,我們平時去取快遞通常都是去各個快遞站,如菜鳥裹裹、媽媽驛站等等,但是在取快遞的時候我們經常要在各種快遞櫃中找來找去,有時候,由於快遞的數量衆多,加之來取放快遞的也很多,甚至會出現把有的快遞已經不在對應標號的快遞櫃,我們取快遞的時候會很麻煩,所以如何簡化我們找取快遞的步驟,如何快速幫我們找到快遞,成爲了一個亟待解決的問題。最近由於一些暴力快遞分揀醜聞被曝光,快遞的運輸問題被越來越多的人所關注,但是由於快件在物流過程中涉及衆多的環節,包括出庫,分揀,運輸,配送等等,所以沒辦法實現對每個環節每個包裹進行監督,快遞很容易在物流過程中由於暴力運輸造成各種碰撞引起商品損壞,而本設計就是一款可以記錄快遞包裹在運輸過程中有沒有被暴力運輸的設備,通過內置的震動檢測,可以記錄包裹的震動次數和實時的震動情況,方便對快遞運送過程進行監督管理。
2、提出假設
現在無線識別技術,無線通信技術以及物聯網技術已經十分發達,是否這些技術也可以用在快遞上面,幫助我們去跟容易的取快遞呢,所以經過查閱多方面資料,我計劃通過無線藍牙通信技術,假設快遞和取快遞人員分爲兩端,通過藍牙技術進行識別通信,來完成快遞的查找。同時通過內置的陀螺儀檢測快遞震動過程的振動值,達到監測記錄的目的。
二、研究方法
1、研究內容
針對日常生活中很多的人需要收快遞,但是快遞的查找是一個非常麻煩的事情,每次在找快遞的時候都需要花費很長時間,這樣我們的時間就被一點點給浪費掉了,而我們設計了這款智能的快遞面單,就是爲了解決這個找尋快遞的問題,物流配送終端智能搜尋系統主要由兩部分組成,一部分爲手持端,負責查找快遞,屬於控制端;一部分屬於標籤端,這部分負責提示用戶,這部分是與快遞綁定在一起,屬於響應端;手持端和標籤端均由三部分組成,這三部分分別爲:藍牙芯片、串口芯片、按鍵模塊。只有在兩個設備中導入相同的手機號才能被相互發現,並且接上數據線還可以與手機進行通信進行導入數據(手機號碼),這個接上電源還可以給設備進行充電,集智能快遞查找與智能充電於一體。同時通過在標籤內部放置監測設備,監測快遞的運送振動值,達到監測快遞是否暴力分揀的目的。
2、研究目的和意義
在市場上快遞行業正在興起,但是在快遞的存儲與找尋的時候便出現了很麻煩的事情,因爲快遞的量是很大的,而快遞點一般就兩個人,這樣如果對快遞不進行一個標記就很難去找尋這個設備,這個裝備就是爲了解決這個問題而研發的,這個裝備能夠很快的給用戶提示這個快遞的所在位置,這樣就可以讓拿快遞的人員快速的定位快遞。
在快件運輸方面,本設計就可以極大的解決這種麻煩,本設計實時的記錄包裹在運輸過程中的劇烈抖動次數,物流的從業者可以在每個環節開始前歸零抖動次數,然後在該環節結束後通過檢查設備的劇烈抖動次數從而確定該包裹有沒有被暴力運輸過,這樣就可以檢查出快件是在哪個環節出了問題,方便追責,同時通過該設備健全了快遞公司的監督機制,可以督促從業者更加平穩的運輸包裹。
三、研究準備
本產品的設計分爲兩個個端,爲了便於安裝和方便人們使用,本產品分爲採用PCB設計,由於PCB的不可更改性,一旦設計好打印出來,如果出現錯誤,更改起來特別麻煩,需要重新畫PCB圖,重新打印,還要重新買相應的元器件,所以在準備階段需要先在可以隨意更改的麪包板上搭建相應的功能電路模塊,然後進行相應的功能測試。
如下是測試階段利用麪包板和初步編寫的單片機歷程測試藍牙模塊功能,通過上位機和藍牙通信測試其控制和信息傳輸功能。
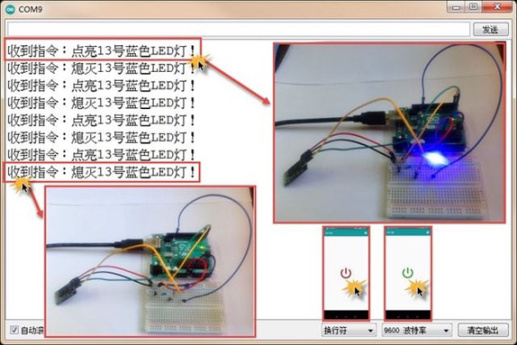
圖1 藍牙模塊測試圖
四、研究過程
1.方案及原理設計設計
首先我們根據準備階段的測試和查找資料,設計了本產品的結構圖如下所示:
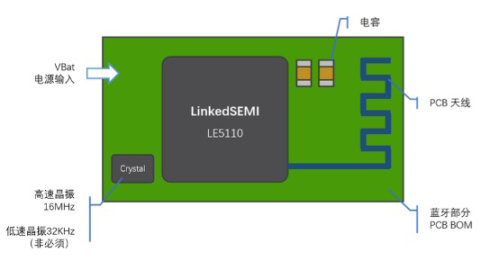
圖2 系統框圖
本作品的設計原理是在所有的快遞盒子上都安裝上快遞面單模塊,模塊使用可充電鋰電池,在快遞盒上貼上此設備,然後用膠帶捆綁住,打開開關,並使用手機與設備的USB接口連接上使用APP進行手機號的設置,設置成功後便可進行發貨。第二部分是將手持端分發給需要取快遞的人員,人員需要使用手機與其連接,並使用相同的APP對手持端的設備進行手機號的設置,設置好後,按下按鍵便可進行設備的查找,如果周圍有相同手機號的設備在便會使快遞面單端進行閃燈以及蜂鳴器的提醒。並且我們還可以通過設備上的按鍵進行設置停止搜索,按下後便可以使其快遞面端恢復原來狀態,並且這兩個設備是可以重複使用的,只要輸入不同的手機號便可實現重複利用。
一方面本裝置設計了一個便捷的震動檢測裝置,可以累積檢測設備的劇烈震動次數,其主要原理是通過一個陀螺儀,可以檢測不同方向的加速度值,如果某個方向的加速度值過高說明包裹劇烈震動,則設備累計一次,通過設備具備清理鍵,這樣在每個環節都可以清零重新計數,通過OLED屏幕將實時累計的震動次數顯示出來,方便管理者進行查看。
如下是本系統的結構圖。
2.硬件設計
本設備的主控採用的是藍牙芯片爲主控,採用的是成品的藍牙模塊,內部集成了距離檢測功能。如圖所示是設備採用的主控芯片:

圖3藍牙芯片
快遞面單端設備在搜索信號的時候會將符合自己要求的設備進行過濾,這時候便可以搜索到我們目的設備,這個時候就可以通過蜂鳴器的聲音以及led燈的光來提示人們,由於藍牙芯片直接驅動蜂鳴器,所以系統採用三極管進行驅動,如圖是採用的驅動電路:
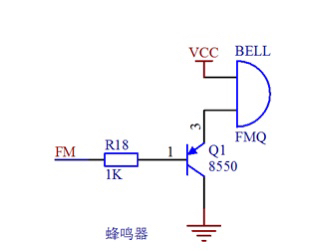
圖4蜂鳴器驅動電路
系統通過3.3V電給系統進行充電,使用的是小型鋰電池,這個時候我們就需要使用電池充電電路了,對於鋰電池充電我們採用的是芯片型號爲:FM4057S52,由於鋰電池電池對充電的要求比較大所以我們在選擇充電芯片的時候需要更爲嚴格,這芯片具有充滿斷電,以及過流斷電,緩慢充電等優點,所以在充電的情況下是可以保證安全的。如下所示:
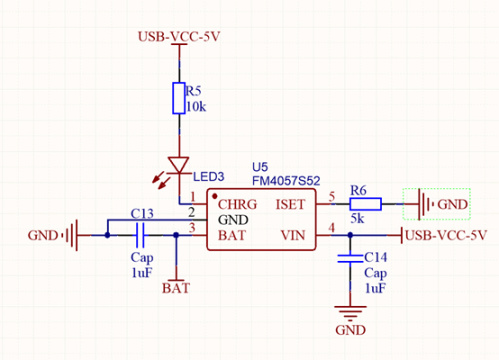
圖5電池充電電路
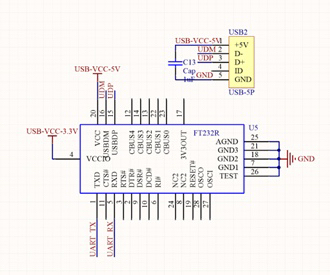
系統中由於需要對手持端與快遞面單端進行手機號的寫入,這樣就需要一個通訊工具了,在硬件上我們採用串口通信,也就是說有了這個芯片,只要手機與整個設備連接後就可以進行通信,這個芯片主要是將我們手機下發的手機號的這類信息轉換成芯片能識別的信息,然後芯片便將這個信息存儲起來,用於設備的識別。如下圖所示電路:
採用mpu6050記錄加速度值,MPU-6050的開關電源引腳電壓爲3.3V,在電源通道和元器件旁插入濾波電容,濾掉溝通交流成分,這樣會使輸出的直流更爲光滑,確保MPU-6050的硬件配置可靠性,達到自動控制系統對高精密姿態數值的規定。
引腳AD0接地裝置,AD0的數值0,MPU-6050的地址爲0x68。IIC通訊引腳SDA和SCL各自接入到控制器的對應引腳,並提升一個4.7KΩ的上拉電阻,確保沒問題的高電平輸出,能夠維護處理芯片,如圖是該模塊的實物圖。
圖9 MPU-6050模塊
本設計需要一個顯示模塊用於顯示震動次數,本設計選用0.96寸的oled屏幕作爲顯示裝置,該屏幕的基本參數見表2-3,通信方式是通過IIC,實物圖如圖2.5所示。

圖10 OLED 屏幕
3、軟件設計
作品分爲一個手持端和1個標籤端,標籤端外觀很薄,是放在快遞盒子表面的。手持端類似一個手機。手持端用於發送信號,標籤端用於接收信號。
如下是本系統的程序流程圖:
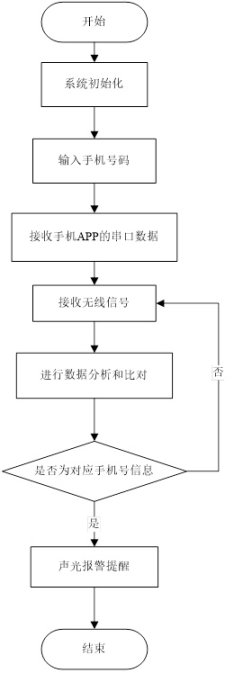
圖11軟件流程圖
監測振動值方面,本設計每次按一下啓動按鍵之後,開始啓動檢測工作,屏幕第一行顯示working,記錄運動過程中的最大振動值。三軸方向的都記錄,將最大的一個軸向值顯示在屏幕上第二行,系統不停的刷新檢測,屏幕上永遠刷新顯示最大的一次震動值。同時,系統啓動檢測工作後,每隔2S寫一次flash,將當前顯示的最大值保存在flash裏面。斷電後開機重啓屏幕會按照第一條需求顯示上次的值,所以每次系統開機後,屏幕讀取flash中保存的最大值,顯示在屏幕上,如果flash中沒有保存過數據則顯示XXX,在檢測工作狀態,再次按一下按鍵,停止檢測。屏幕顯示最大值不動。外還有一個按鍵,按一下可以清除掉flash裏面的數據,因爲重新寄下一個包裹或者進行下一個運輸環節的時候需要使用到清除功能,如圖是本設計的軟件設計流程圖。
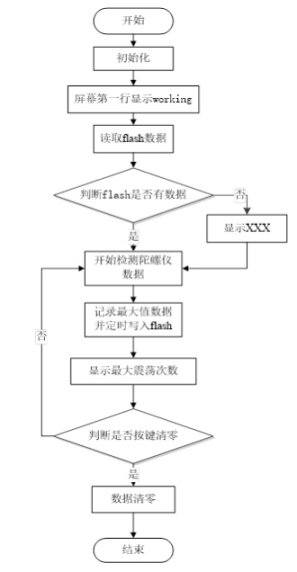
圖12程序流程圖
4、實物製作
材料準備:我們首先將所有要使用到的材料進行備好,後面在焊接的時候便可以一目瞭然的進行對號入座。
材料焊接:焊接必須使用到焊接設備與電路板,以下便是焊接的裝備以及PCB板,現在我們就可以直接進行焊接操作了。
焊接完畢後便是下圖所示模樣:

5、功能調試
以上焊接的工作便已經完成,緊接着進行下軟件和功能調試。
準備好電腦上的軟件程序,打開軟件之後,利用jflash軟件將程序通過下載器下載到藍牙芯片中。如圖是 程序截圖:
下載程序如下,採用的下載軟件是jflash,下載工具是jlink下載器。下載器連接到電腦的usb口,另外一邊連接到藍牙模塊上。鼠標點擊jflash上面的按鈕即可進行下載。
由於我們的設備需要一個外殼進行美化,所以在進行焊接完後我們會使用3D打印技術給設備進行外殼進行建模以及打印外殼,打印好的外殼會和自己設計的板子一樣的尺寸,如下圖所示:
所有材料全部準備完畢後我們就可以開始進行設備的組裝,這時我們便可以進行整體的安裝與調整。並使用膠水粘上。
安裝後便需要做最後進行整機的調試,這個調試主要進行功能部分,只要功能部分沒有問題後這個設備就已經完成。
五、結果與分析
經過測試本產品可以實現如下功能:
在標籤端,寄快遞之前通過串口將收件人的手機號寫入標籤端中。掉電不丟失,只需要存一條即可。標籤端就會不停的查詢外來信號,一旦發現信號中的數據是寫入自己內存的手機號則蜂鳴器響,同時LED閃爍。直到手持端的信號消失,則蜂鳴器停止響,LED熄滅。預留一個手機充電口的micro接口用於充電同時也可以用於寫入手機號。寫入手機號的協議是串口協議。手機號寫入成功之後串口要返回一句“Write to successful”,並且本產品具有電源開關,再不使用時可以關閉,減少耗電。
在手持端,手持段盒子底部有一個micro接口,可以用於充電也可以用於寫入數據。需要查找快遞的時候通過串口寫入收件人的手機號即可,掉電可以丟失,數據可以覆蓋。手持段表面有一個信號按鍵,按下就是搜索,一旦按鍵按下了,就開始發出信號,信號中發送出去的信息就是通過串口寫入的手機號。按鍵彈起了則停止信號。同時發出信號的時候有一個LED指示燈亮起。手持端信號結束後LED也會熄滅。如果按下手持端的按鍵,但是沒有通過串口寫入手機號到設備中,則蜂鳴器會響三聲。和標籤端相同具有有一個電源開關。
本項目通過檢測快遞運送過程中的最大振動值來判斷快遞是否暴力分揀,對於不通的運輸物品,其允許的最大振動值是不一樣的,有的易碎品對於振動值的要求嚴格,部分物品在運輸過程中允許進行一定程度的震動。快遞公司管理人員可以根據檢查快遞運送過程種的振動值是否超過限定標準,從而對快遞員的責任進行追溯,有效的促進快遞物流的監督管理。
六、得出結論
本設計無論在實用性還是功能性上都可以達到本文所提到的問題,可以有效的解決人們在快遞站找快遞較爲麻煩的問題。在快遞行業本設計是較爲創新性的產品,填補了快遞物流行業該領域的空白,具有很廣闊的市場前景。
而且設計在一些快遞站點進行的多次的測試,具有很好的使用效果。
七、建議
在實際的測試和使用過程中,通過統計人們的使用體驗和建議,同時諮指導詢老師和專家的意見,我也發現了本設計存在的很多問題,如本產品需要進行一一安裝,較爲麻煩,需要花費工作人員很大的工作量,所以我考慮本設計是不是應該在分揀環節就進行安裝匹配,因爲現在物流分揀,很多都是採用了自動化,所以本產品可以在物流分揀環節就通過自動化設備進行安裝,這樣就等於給每個快遞安裝了標籤,在物流運輸過程中,也可以方便管理人員和工作人員進行分流查找,所以本產品計劃後面進行改進,設計的更加精小,如標籤一般,並且增加新的固定安裝的結構,更加容易安裝配對和使用。
八、心得體會
本課題從多個方面描述物流配送終端智能搜尋系統的各個細節,硬件設計、焊接、軟件調試,在此過程中我學到了很多,通過查找資料,整合資料,逐漸完成一個項目的方案設計,設計之餘,讓我深深地發覺,學校裏學的很多科目都是很有用的,在設計過程中經常發現很多知識還不能很好地掌握,還需要不斷地深入學習,比如編程的方法及其硬件電路的設計原理。這次設計對於我來說是一次不錯的提升,讓我認識到自身的不足。在這個設計的全部過程中,是嚴格按照產品的實際開發流程實施的,雖然起初並不熟練,摸索着進行,但是好在能堅持做完全部的設計。經過這次設計讓我瞭解一個產品誕生要經過調研-方案設計-器件選型-樣機試製-調試運行幾個階段。但是這次的設計過程中還存在很多的不足之處,比如,公式的運用,參數的設置,在仿真時軟件的使用和將結果偏差等等,在今後的工作設計中,我都會把現在遇到的問題認真對待,努力做到不再會犯這些錯誤
九、致謝
在本次的項目設計乃至論文的編寫過程中我遇到過很多的問題,有些問題我通過查找資料自己就能解決了但是有很多問題我暫時根本沒有能力去解決。就比如在一開始接觸到這個問題的時候我嘗試過很多方案都不行,後來我的指導老師一直不停地給我分析問題,分析分析方案合理性,我纔有了一個方向,在此我要對我的老師表示最由衷的感謝。
最後在仿真過程中也遇到了許多的困難,其中遇到的一些我問題解決不了的時候都是同學給了我很大的幫助。整個設計實驗過程中,我接觸到了許多之前未曾接觸的東西,使我的專業知識和素養能力得到了較大的提高。特別要感謝指導老師的耐心教導,和學校的栽培。在以後的學習工作中,仍應當繼續提高個人專業素養。我將會更加的努力,以學習的態度做好每一件工作。
十、參考文獻
[1]吳劍橋,辜倩琳,區海峯,李戈,李明珂.基於萬物互聯互通背景下的物流倉儲管理體制分析——以藍牙與Android平臺的智能物流系統設計爲例[J].市場觀察,2020(09):31.
[2]鄭春紅,劉志敏,董海山.基於Android平臺的倉儲物流移動管理系統的實現[J].現代信息科技,2020,4(17):171-174.
[3]楊海軍,侯永琪,王利祥,曹雲龍,焦鴻韜,楊浩.一種基於ROS的藍牙定位快遞配送機器人設計[J].科技創新與應用,2021,11(27):65-69+72.
[4]吳蓬勃,李莉,張金燕,李學海.基於藍牙散射網的遠程驗室研究與探索,2017,36(07):80-85+107.
[5]劉袁夢,黃文彬,許小郡,毋茂盛.快遞物品遠程自動接收系統設計與開發[J].物聯網技術,2016,6(12):86-88+91.
[6]陳俊東,馬遠佳,蔡樹豪,洪彩珊,朱雪玲.基於安卓平臺的智能快遞櫃設計[J].電子世界,2016(19):103-104.0
更多遊戲資訊請關註:電玩幫遊戲資訊專區
電玩幫圖文攻略 www.vgover.com

















