你敢相信吗?技术奇点居然先降临在了一只果蝇身上。
前两天,国外有个叫 Eon Systems 在 X 上放出一段视频,标题简单到离谱:《The First Multi-Behavior Brain Upload》(首次多行为脑上传)。
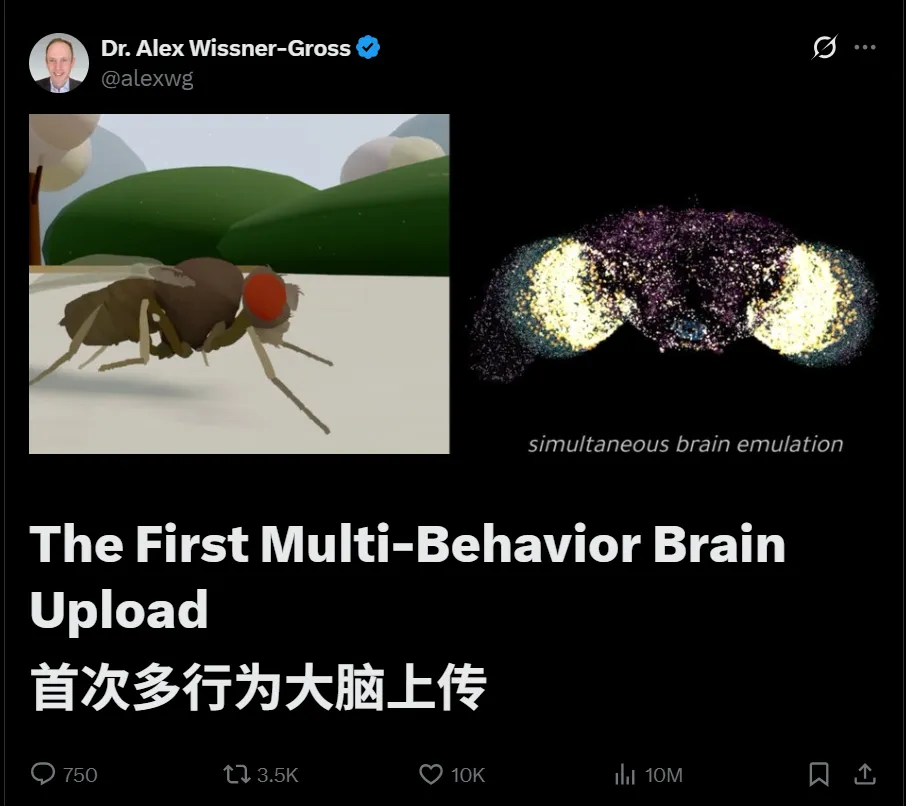
视频里,一只虚拟果蝇在物理引擎里晃悠。
它一会儿迈腿走路,一会儿抬起前足梳毛,一会儿又低头觅食,,,这一切看起来似乎没什么稀奇的。
但是,以上所有动作既不是脚本动画,也不是强化学习训练出来的。
视频中的果蝇,它纯粹靠自己大脑里的12.5万神经元和5000万突触在驱动,在这个虚拟的世界中到处乱逛。
此事吸引来了 Anthropic 研究员 Hattie Zhou 的转发,随后便被 Musk 看到。
马斯克刷到后只回了一个词:Wow。

这条帖瞬间刷爆X,浏览量破千万。
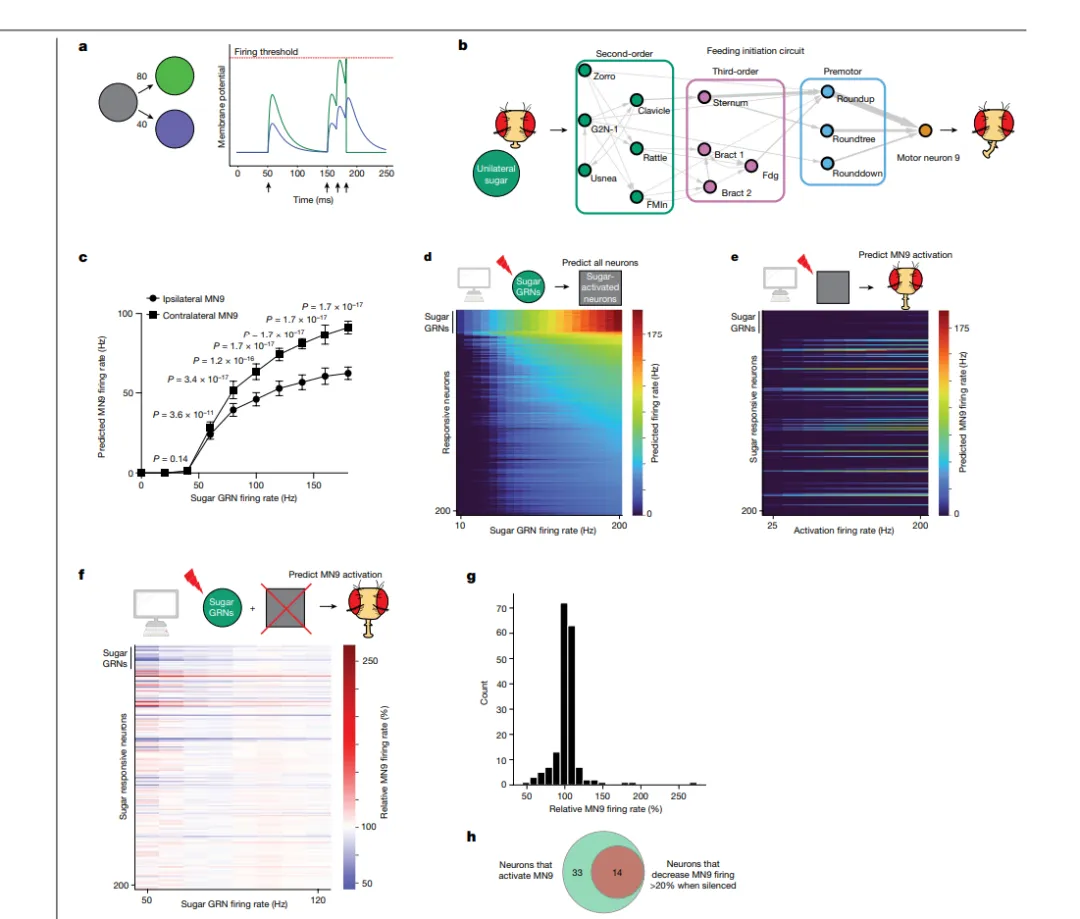
这只果蝇的大脑最初来自2024年Nature一篇重磅论文,研究团队把果蝇全脑connectome完整扫描下来,用最简单的Leaky Integrate-and-Fire神经元模型,只靠连接图、突触权重和兴奋抑制标记,就让它在虚拟身体里活了过来。
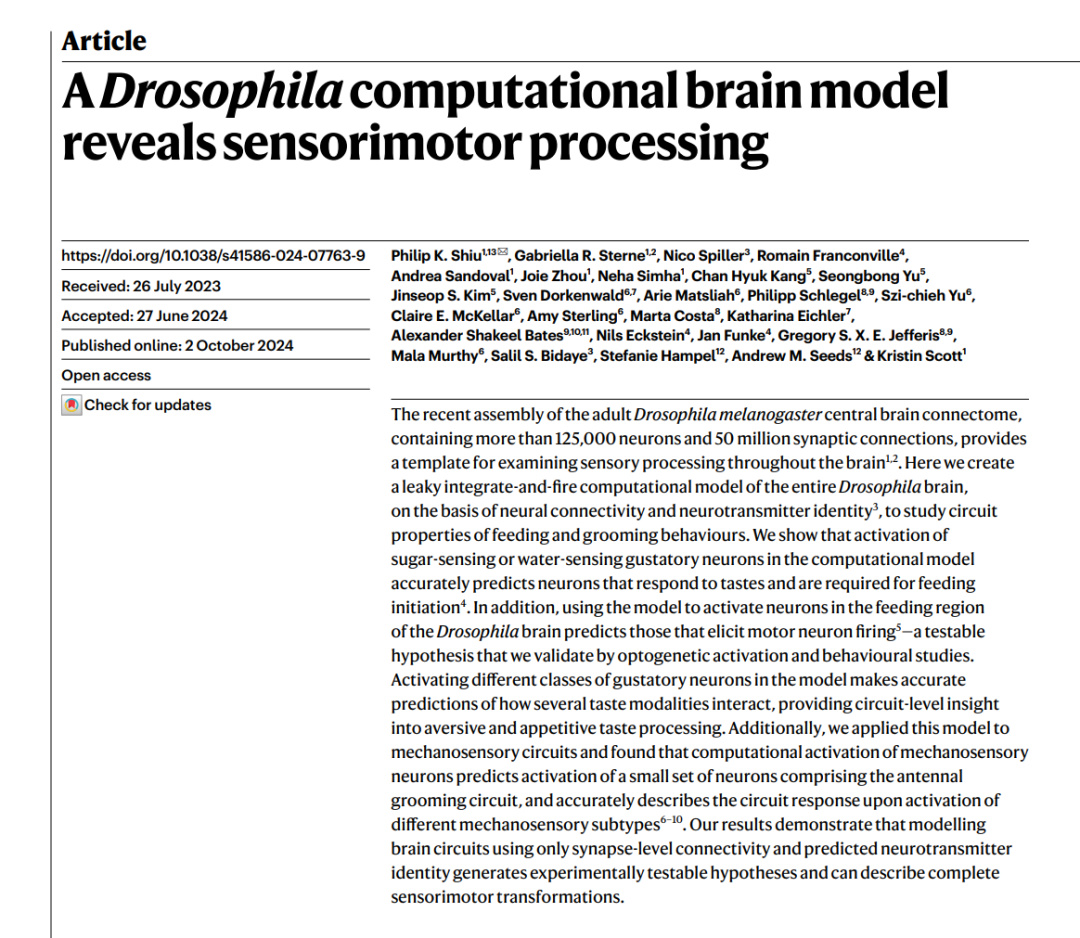
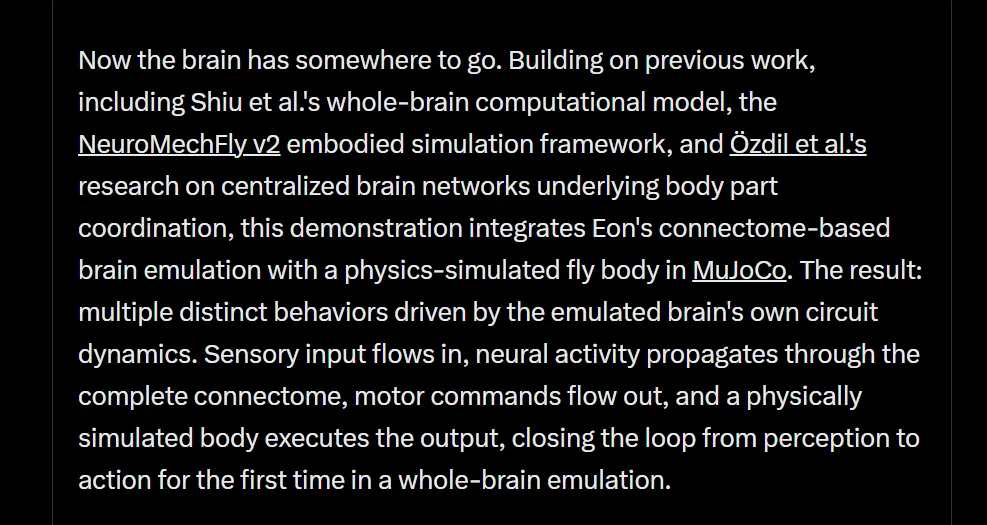
接入MuJoCo物理引擎后,感知-行动闭环第一次真正闭合,91%的行为和真实果蝇高度一致。
以前DeepMind和Janelia团队用强化学习让果蝇动起来,OpenWorm花了十几年才把302个神经元的线虫模拟出基本蠕动。
而这次,Eon Systems直接跳过了训练,直接把真实生物的“接线图”插进数字身体。
区别就像用乐高按图搭房子,和让房子自己长出来。
他们具体过程其实一步步其实也是有迹可循的。
第一步,他们拿到了FlyWire项目完整扫描的果蝇大脑connectome,12.5万个神经元、5000万条突触的精确接线图——这是2024年Nature那篇论文的底层数据,相当于把果蝇的整个“电路板”原封不动复制下来。
第二步,他们套用论文里那个最简单的Leaky Integrate-and-Fire神经元模型,只用兴奋/抑制标记、突触权重和基本放电规则,不加任何花里胡哨的训练层。
模型本身不复杂,但它忠实还原了生物大脑的原始动力学。
第三步,把这个数字大脑插进NeuroMechFly v2骨架,再塞进MuJoCo物理引擎。身体有了重力、摩擦、关节限制,传感器也能实时反馈触碰、气味、光线,感知和行动第一次形成闭环。
第四步,什么都不再干预。没有脚本控制,没有强化学习奖励函数。他们只是把虚拟果蝇扔进环境,让它自己跑。
然后奇迹就出现了。
果蝇开始自主行走,它会躲避障碍,会调整步态,会在地面上转圈寻找食物。
抬起前足梳理翅膀的动作自然得像真的在镜子前打理自己。
觅食时它甚至会根据气味浓度改变路线,91%的行为和真实果蝇高度一致,全靠大脑内部的电流涌动自己涌现出来。
这段过程看完最震撼的地方在于:它不是“被编程”成这样,而是这个从未在真实世界出生过的果蝇大脑,自己所决定要这样动。
以前我们总觉得AI要学会走路得训几万小时,这次果蝇只用了一张接线图,就把“活过来”这件事干成了。
当然,以上这些现在还有明显短板,果蝇的运动神经元扫描还不完整,没有长期记忆,也学不会新技能。
对了,创始人之一 Alexander D. Wissner-Gross 是 MIT 传奇人物,早年就拿过多个AI奖项。他和团队的目标很清楚:先果蝇,再老鼠(7000万神经元,是果蝇的560倍),最终人类大脑。
技术路线已经写好,用膨胀显微镜和活体成像把规模问题变成纯工程问题。
他们想让人类在ASI时代依然保有主体性,而不是被彻底甩开。
Eon Systems的团队说,他们只是把生物学最硬的connectome数据喂给了物理引擎,剩下的,是大脑自己决定要怎么动。
这句话听起来轻描淡写,却把整个AI圈的叙事悄悄翻了个面:原来奇点不只属于人工超级智能,它也可以从最古老、最小的生物大脑开始。
现在视频还在循环播放,那只果蝇还在虚拟空间里晃悠。
赛博果蝇活了,赛博鼠鼠也快了,
下一个,会是谁?
更多游戏资讯请关注:电玩帮游戏资讯专区
电玩帮图文攻略 www.vgover.com

















