今天一大早,沉迷创业快两年时间的 B 站知名 up 主稚晖君,终于又正经更新了一期视频。

发布后六个小时浏览量 70 万 + ,单纯从播放量看虽说已经不比当年,但掏出来家伙是越来越有看头了。
这期视频里,稚晖君一共花 12 分钟,详细介绍了灵犀 X2 这个 “ 悄咪咪研发了三个月 ” 的人形机器人。

跟宇树、众擎那些机器人公司每次 po 出来的视频差不多,灵犀 X2 也是以炫技为主。
现在让它走路都是大材小用了,踩滑板车稳稳当当。
当年给葡萄缝针的技能,又在灵犀 X2 身上复刻了一把。

甚至,你现在不需要做梦,就能看到机器人骑自行车了。

不过虽说都是炫技,但世超仔细对比了灵犀 X2 和其他机器人在 “demo” 层面的表现,发现灵犀 X2 更有人味儿。特别是在学人类抠屁股、挠痒痒、抖腿这种小动作上,模仿得确实有味道。
好了咱也不多废话,灵犀 X2 这次主要实现了运动、交互和作业三个能力的提升,大伙儿直接跟着世超往下看吧。
灵犀 X1 相关参数
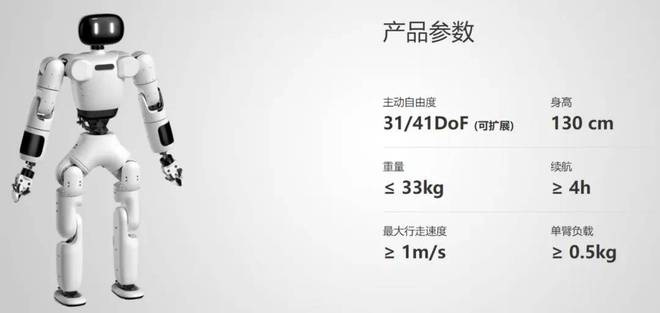
但在本体设计上,稚晖君和他的团队还是在灵犀 X2 身上花了不少心思。
全身 28 个自由度,体重 33.8 千克,搭载了小脑控制器 Xyber-Edge 、域控制器 Xyber-DCU 和智能电源管理系统 Xyber-BMS。
虽然自由度看着是比灵犀 X1 少了,但灵犀 X2 这次在机械结构的设计上,并没有采用并联结构。( 灵犀 X1 是串并联混合结构 )
也就是说,灵犀 X2 的这 28 个自由度,每一个都可以独立驱动,少了相互牵制的问题就更好控制了。
而且,在选择机器人外壳材料的时候,他们就连化妆用的美妆蛋都考虑到了。。。

反正在渲染的短片里,又是什么续航从容、散热无忧,让世超有一种在看扫地机器人发布会的感觉。
当然了,这些硬件上的改动只是给灵犀 X2 点了一部分天赋树,真想炫技,还得靠运动控制算法层面的突破。
根据视频的介绍,现在足式机器人的运动控制,已经全面从 Model-based 转向了 learning 驱动的强化学习。
反正在深度强化学习和模仿学习的调教下,灵犀 X2 的运动天赋已经被激活了。
除了前面的骑自行车,灵犀 X2 还可以从走路到跑步,丝滑切换状态。

科目三也是跳上了,这小腿扭得还挺带劲。

骑平衡车最后那一下刹车的样子,更绝了,这玩意儿让他骑着平衡车送外卖不知道能不能行?

另外,装了多模态大模型的灵犀 X2 在交互能力上,也有点说法。
别人家的机器人还在想怎么才能把动作做得漂亮,灵犀 X2 已经坐下来跟你唠家常了。

不过世超觉得这种跟机器人一问一答的形式,还有所谓的视觉识别,其实并不新鲜。。。
反而是机器人在交互过程中的反应速度,让世超觉得眼前一亮。在视频演示中,基本稚晖君的问题抛出去不到 2 秒钟,灵犀 X2 就能接上话。

而且他们还把动作模态集成到了模型里,灵犀 X2 的活人感就是这么来的。
虽然没有呼吸,但是装作会呼吸。

这熟悉的挠屁股动作,总觉得好像在哪见过。

就是吧,这个远程裸眼的 3D 交流,实在是太抽象了。。。我的评价是,不如直接套上吴彦祖的面具好吧。

最后,就是展示灵犀 X2 的干活儿能力了。
其实主要是强调了,在智元一系列研究成果的加持下,灵犀 X2 能干的活儿是越来越多了。还举了个“ 吉祥三保 ” ( 保安、保洁和保姆 )的例子,展望了一把灵犀 X2 可能要进化的方向。
但有一说一,把机器人跟生产力挂钩那部分,世超并没有太多的共鸣,或者说实感?不管是灵犀 X2 ,还是其他家的人形机器人,现阶段的实用性,似乎都比不上一些专用机器人( 工业机械臂、 AGV 等 )。

不可否认,今年的人形机器人领域确实热闹,隔三差五就会有公司发视频,展示自家机器人又能挑战哪些高难度动作了。
秀运动控制没毛病,这毕竟也是进化过程的一部分。但结合前段时间高盛给宇树科技泼的冷水,即使人形机器人能跑能跳还能后空翻,离真正意义上的 “ 通用 ” 也还远得很。
就像稚晖君在视频末尾说的那样:莱特兄弟的飞机远比空气重,图灵的计算机也曾占满整个房间,人们总是高估一个技术的短期价值,而往往低估他的长期价值。
至于人形机器人的 “ChatGPT 时刻 ” 啥时候到来,这个问题,还是交给专业的人来回答吧。
撰文:西西
编辑:江江&面线
美编: 焕妍
图片、资料来源:
B站:@稚晖君、@智元机器人
部分图源网络
更多游戏资讯请关注:电玩帮游戏资讯专区
电玩帮图文攻略 www.vgover.com














![IGN 9 分实至名归!一篇文章告诉你《黑旗 记忆重置》都[重置]了啥](https://imgheybox1.max-c.com/web/bbs/2026/07/08/0ba0251830d443c28879a959b36bd994.png?imageMogr2/auto-orient/ignore-error/1/format/jpg/thumbnail/398x679%3E)

