既能上春晚扭秧歌,又能模仿科比的後仰跳投、復現 C 羅的騰空半轉身。
前陣子,宇樹科技的人形機器人,可謂是出盡了風頭。
結果這還沒幾天,他們家的機器人就又雙叒進化了。
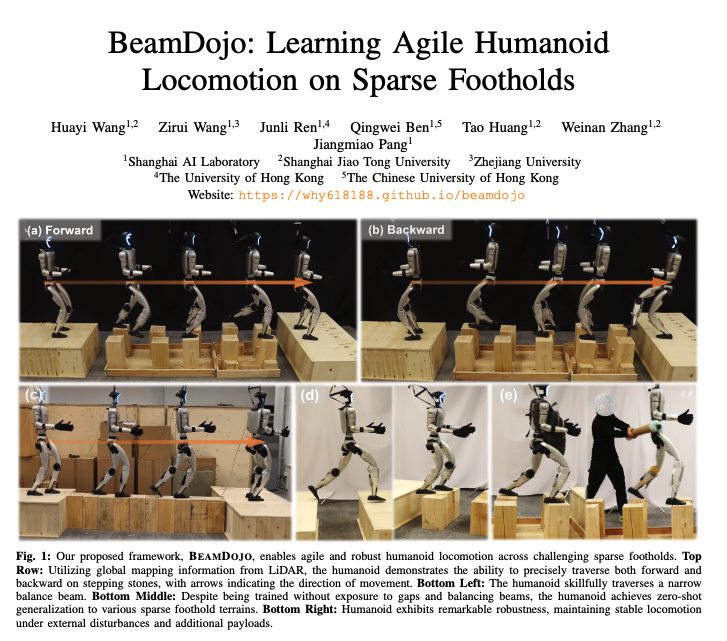
梅花樁挑戰,沒有一步踩空,走得穩穩當當。
不光能正着走,倒着走也如履平地,這換個真人來都不一定能做到好吧。。。

平衡木雖說走出了一種喝醉的感覺,但好歹也沒摔。
還有更酷炫的,舞一曲哪吒的《 天雷滾滾我好怕怕 》
指望以後機器人給養老的,看看 G1 現在也開始學推輪椅了。
誇張點,要是 G1 按照這一月好幾次進化的速度,或許明年就能進咱家當保姆了。
不過說起來,這些新技能,
其實並不是宇樹的員工親手調教出來的。
像前面挑戰梅花樁的 G1 ,就是上海 AI 實驗室聯合了國內好幾所頂尖大學,一起研究出來的成果。而那個蹭了哪吒熱度的 G1 ,也是出自上海 AI 實驗室等機構之手。
所以世超這次也研究了一波兩篇論文,發現這倆研究
一個能讓人形機器人挑戰高難度地形,另外一個,則是把遠程控制機器人的成本打了下來。
可以說這倆研究成果,爲現階段人形機器人在運動控制、數據採集還有成本上的難題,都提供了更新的解題思路。
咱先來看第一篇論文,《 BeamDojo : Learning Agile Humanoid Locomotion on Sparse Footholds 》( BeamDojo :在稀疏立足點上學習敏捷類人運動)。
裏面有倆地方還挺值得一嘮。
以前複雜地形的實驗,多是針對四足機器人的,那腳的形狀跟人形的壓根不一樣。即使有針對人形機器人的訓練,效率也不高,但 BeamDojo 劃重點就是
“ 人形機器人 ”“ 複雜地形 ”“ 高效 ”
。
另外一點,就是零樣本泛化這種舉一反三的能力。
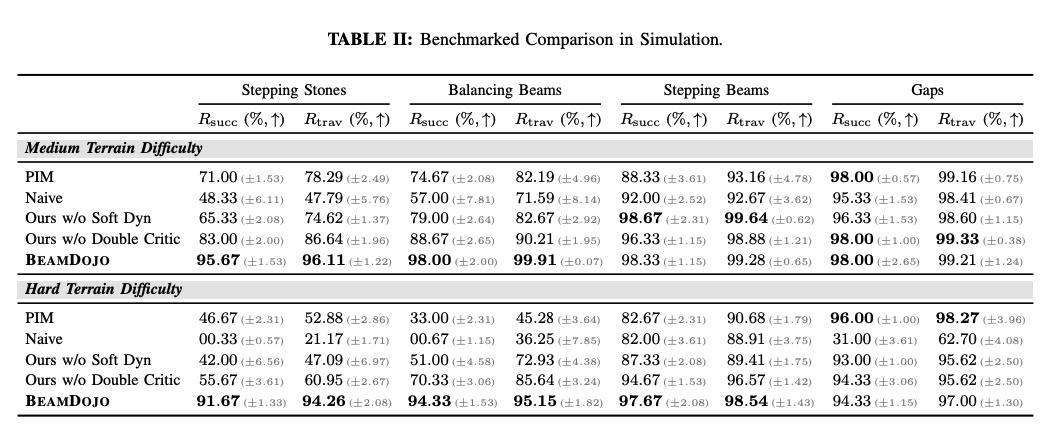
所以 BeamDojo 強化學習框架,設計了一種專門針對人形機器人的訓練方法,讓機器人能在平衡木這些複雜地形上,走得又快又穩。
就比如訓練過程中,研究人員引入了一個
落腳點獎勵機制
。
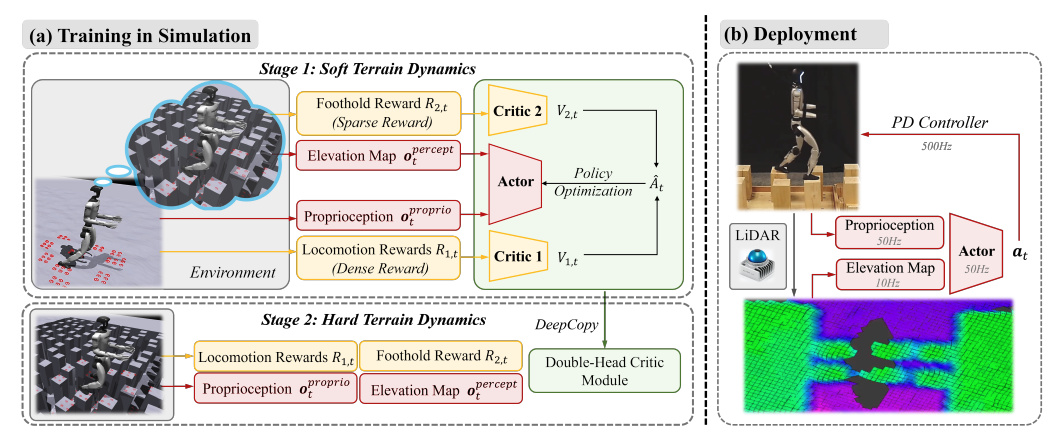
可以結合地形數據和機器人腳底的採樣,計算它踏出去的每一步,是否踩在安全區域內。
如果大部分採樣點在安全區域內,自然有獎勵,反之就要挨罰。
另外,這篇論文的實驗中,還提到了從仿真環境到真實世界,
BeamDojo 的零樣本泛化的成功率有 80% 。
換句話說,在仿真環境中訓練好之後,到了真實地形上,不需要額外的微調,機器人也有很大概率能走得又快又穩。
這種能力,對於機器人來說非常重要,所以也成爲了現在學界和業界的主流研究方向。
像 AI 大牛李飛飛和她的研究團隊,之前就發佈過一篇論文, “ 數字表親 ” 可以讓機器人零樣本泛化的成功率達到了 90% 。
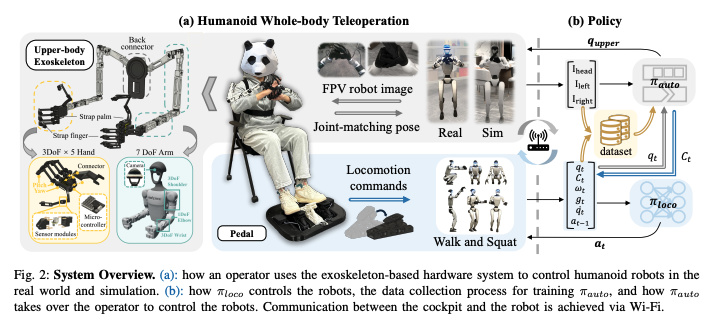
另外一篇論文,介紹的其實是一個人形機器人遠程控制系統。
這跟上次斯坦福那個,也是遠程控制的 Aloha 機器人不太一樣。以前只是控制雙臂,但上海 AI 實驗室的 HOMIE ,
可以控制機器人全身的自由移動。
實現的原理大概就是設計了一套外骨骼設備( 機械手臂、智能手套、腳踏板 ),讓研究人員可以通過這個 “ 駕駛艙 ” ,用全身控制機器人。
這套系統的強化學習框架中,也涉及到了三個核心技術:
上半身姿態課程學習、高度追蹤獎勵和對稱性利用
。
專業名詞聽起來很嚇人,但概念理解起來也沒那麼難。
像上半身姿態課程學習,就是讓機器人學習更多、更復雜的上肢動作。
而高度追蹤獎勵,跟訓狗一個道理。讓機器人下蹲或者站立到某個高度,完成任務就能獲得獎勵。對稱性利用,說白了就是讓機器人的左右兩邊的動作更協調、一致。
最主要的是,外骨骼設備的硬件成本,
只需要 3500 ,人民幣。
這要比其他同樣是做遠程控制方案的機器人,成本要低得多。比如斯坦福 Aloha 機器人的硬件成本,就要 3.2 萬美元,在當時看來,已經算比較低了。
所以這麼一對比,更顯得 3500 元是擊穿地板價的存在。
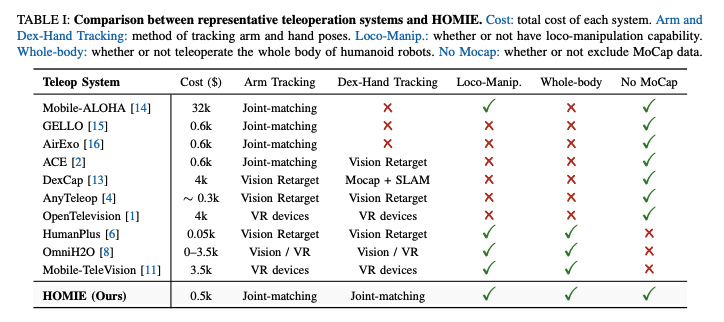
而且從數據採集的精度來看,也要比 VR 設備的方案要更高( 論文中是跟 OpenTeleVision 進行了對比 )。
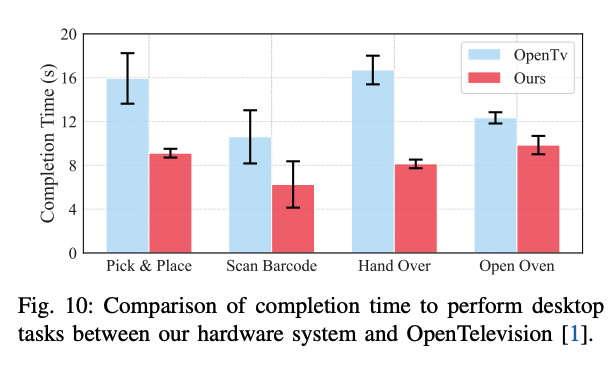
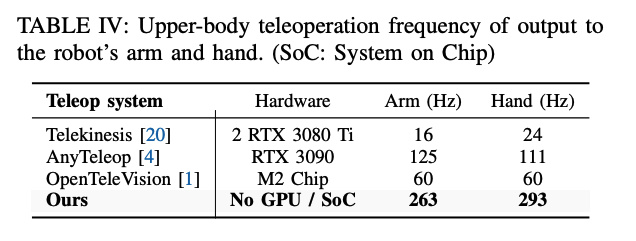
所以世超覺着, HOMIE 最大的貢獻之一,或許就是找到了一種
低成本、高精度
的機器人數據採集方法。
看下來,不管是 BEAMDOJO 強化學習框架,還是 HOMIE 控制系統,這些前沿研究,都是衝着
具身智能的疑難雜症
去的。
不可否認,現階段的具身智能還遠沒能達到,科幻電影中的完美對照。
但現在的機器人就特別像,十年前的 AI 。那個時候,也沒有人預想到 ChatGPT 、 DeepSeek 的出現,什麼 AI 視頻、 AI 音樂,更是天方夜譚。
因爲大部分的技術探索,咱們平時也接觸不到,所以只有當質變發生以後,我們纔會反應過來。

結合今年剛開年就新動態不斷的機器人行業,世超賭一手,不說應用大規模落地,但在機器人的靈活性、適應性上,今年肯定有的看了。
前兩天,宇樹科技的王興興不還說,預計年底他們家人形機器人 H1 的跑步速度,就要達到了 10m/s 。
這速度,跟博爾特都有的一比。
反正,咱們就等着看吧。
撰文:西西
編輯:江江&面線
美編:煥妍
圖片、資料來源:
上海人工智能實驗室公衆號、《機械公敵》電影截圖
《HOMIE: Humanoid Loco-Manipulationwith Isomorphic Exoskeleton Cockpit》
《BeamDojo: Learning Agile Humanoid Locomotion on Sparse Footholds》
https://homietele.github.io/
https://why618188.github.io/beamdojo/
更多遊戲資訊請關註:電玩幫遊戲資訊專區
電玩幫圖文攻略 www.vgover.com

















