省流總結
趕時間的朋友依舊看這裏 (๑¯◡¯๑):
爲什麼精英怪"什麼都會"? 不是數值高,而是底層架構讓它能同時幹很多事——而且隨時能中斷當前行爲,切到更緊急的事。
FSM 改一個行爲要連 10 條線,行爲樹只需要插一個樹枝。 狀態越多,這個差距越恐怖。
但別盲目上行爲樹。 AI 只有 5 個狀態?用行爲樹是殺雞用牛刀。
想知道《最後生還者》的 Hunter 是怎麼"不做蠢事"的?《光環 2》怎麼用樹形結構第一次在 3A 遊戲裏證明有效性?《全境封鎖》怎麼靠行爲樹管理 55 種 NPC 變體?
往下翻,答案都在後面。
引子
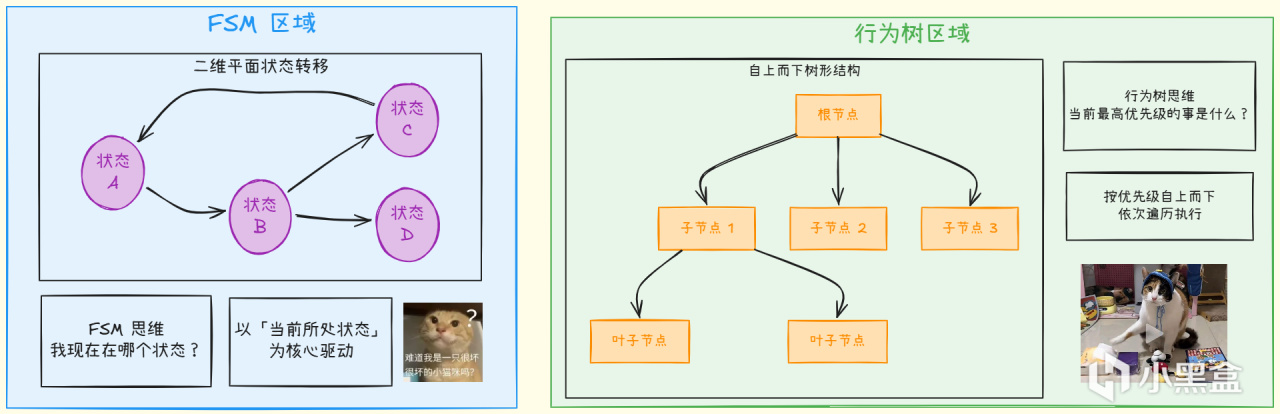
上一篇我們聊了有限狀態機(FSM)——從喫豆人的四個幽靈,到合金裝備的守衛 AI,再到魂系 Boss 的套路循環。FSM 在簡單場景下確實好用,但當狀態數超過某個閾值後,"狀態爆炸"會讓系統變得沒法維護。
如果你還沒看過第一篇,建議先補課——本篇會直接沿用 FSM 的基本概念(狀態、轉移、動作),不再重複解釋。
今天這篇,來看看 FSM 遇到瓶頸之後,業界是怎麼破局的。
你遇到過那種讓你血壓飆升的精英怪嗎?
不是因爲它數值高,而是因爲它什麼都會Σ( ° △ °|||)︴
你剛躲進掩體喘口氣,它切槍包抄你側翼。你拉開距離想狙擊,它三槍點射然後縮回去。你把它打殘了,它一邊丟煙霧彈一邊往掩體後跑,追都追不上。
這一刻你心裏冒出的念頭不是"這傢伙好聰明",而是:"它怎麼同時幹這麼多事的?它到底在想什麼?"
要理解這種"同時幹很多事"的能力從何而來,我們可以從設計者的角度換個思路——
想象一下你在給一個按部就班的管家寫"待辦清單"。但問題是,一個"看起來聰明"的管家,背後需要的判斷條件,可能比你能想到的所有情況加起來還多。
我們來感受一下這個問題的規模。
你需要教會笨蛋管家處理以下情況:日常打掃、發現漏水、修理水管、準備晚餐、有客人到訪、寵物生病、火警響起、停電後恢復、打掃完成後彙報……
用 FSM 來實現的話,你需要畫一張狀態圖:每個行爲是一個狀態,狀態之間用轉移線連接。
9 個狀態,最多 72 條轉移線。15 個狀態,最多 210 條。30 個狀態?快 1000 條了。
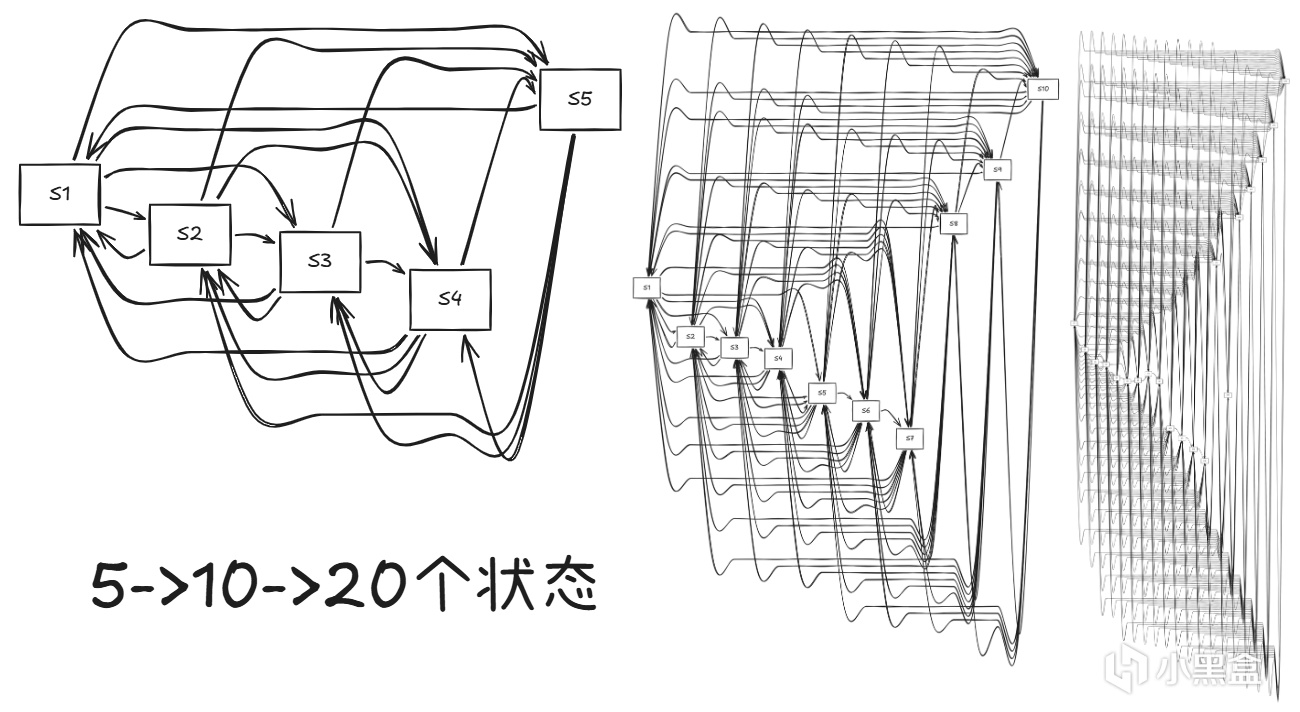
這不是壓縮毛巾,這是狀態爆炸
這還沒完。你想加一個"被閃光彈致盲"的新狀態?你需要從每一個已有狀態畫一條轉移到新狀態的線,還要考慮被致盲後恢復到哪個狀態。
每加一個新狀態,維護成本都在漲。
這就是所謂的"狀態爆炸"(State Explosion)——狀態數量線性增長,轉移線數量呈平方級增長。改一個狀態,牽動整個網絡。
第一章:《最後生還者》
狀態機的最佳實踐與限制
上篇聊過《光環 2》裏 Bungie 是怎麼用 Objective Tree(目標樹)應對狀態爆炸的。而在 Bungie 之後約十年,Naughty Dog 選擇了另一條路:把成熟的架構通過工程實踐打磨到工業級水準。
如果說 FSM/HFSM 有一個"工業級最佳實踐",那 Naughty Dog 在《最後生還者》(The Last of Us, 2013)中實現的 Hunter AI 絕對是這個方向的代表作。
2014 年,Naughty Dog 的 AI 程序員 Travis McIntosh 在 GDC 上做了一個演講,題爲 《The Last of Us: Human Enemy AI》。 這個演講之所以能成爲經典,不是因爲它展示了什麼新技術——恰恰相反,它展示的是如何把一套成熟的系統通過大量工程調優做到 3A 級別的水準。
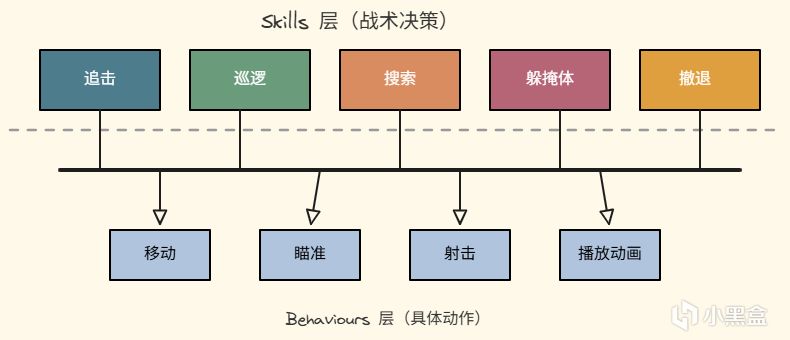
Skills Priority Stack + Behaviours 兩層架構
Naughty Dog 的 Hunter AI 並非傳統意義上的 HFSM,而是採用了一種技能優先級堆棧(Skills Priority Stack)+ Behaviours的分層架構。
核心思想很簡單:把決策分成兩層,上層決定"做什麼",下層決定"怎麼做"。
Skills(技能 / 高層決策): 這是 AI 的"戰術層"。它決定 Hunter 當前應該採取什麼策略——追擊玩家、在掩體後等待、搜索擾動來源、包抄玩家側翼,還是撤退。這些 Skills 通過一個優先級堆棧(Priority Stack)管理,每個 Skill 有自己的啓用/禁用條件,堆棧決定了哪些 Skill 可以中斷哪些 Skill。
Behaviours(行爲 / 底層執行): 這是 AI 的"執行層"。它負責把高層意圖落地——怎麼移動、怎麼瞄準、怎麼射擊、怎麼播放動畫。Behaviours 通過一個Behaviour Stack管理,負責改變動畫狀態和尋路系統。
Post Selectors(位置選擇器): 用於選擇掩體、開放位置等,這些選擇器的條件定義使用LISP 腳本編寫。
注意: TLOU 的系統更接近一個"帶優先級的任務調度器",而不是傳統 HFSM 的"狀態機 + 子狀態機"模型。傳統 HFSM 中,子狀態之間的切換仍然需要顯式編寫轉移線;而 TLOU 的架構中,系統通過優先級堆棧自動選擇最高分的 Skill,不需要手動編寫 Skill 之間的轉移關係。
這種架構的好處是解耦。
一個 Hunter 可以有"追擊"這個 Skill,但具體怎麼追擊——是跑步追擊還是蹲伏追擊——由 Behaviour 層決定。
不同敵人可以共用同一套 Behaviours,只需要配置不同的 Skills。同一套"走路"和"射擊"的底層代碼,普通士兵和精英士兵都能用,區別只在於高層決策不同。
感知系統:視覺視錐 + 音頻傳感器
Hunter AI 之所以"看起來聰明",很大程度上歸功於它的感知系統。
這個系統由兩部分組成:
視覺視錐(View Cones): 每個 Hunter 有一個扇形的視野區域。在這個區域內的玩家會被"看到",區域外的則不會。視錐的角度和距離會根據難度和情境動態調整。
音頻傳感器(Audio Sensors): 玩家在環境中發出的聲音(腳步聲、槍聲、碰倒物品)會被 Hunter "聽到"。聲音傳播的距離和方向決定了 Hunter 的反應——聽到遠處槍聲可能只是"警覺",聽到身邊腳步聲則直接進入"搜索"狀態。
感知系統和決策系統的分離,是《最後生還者》AI 設計的另一個精妙之處。 感知系統輸出"玩家可能在附近"這樣的模糊信息,決策系統再根據這些信息選擇對應的 Skill。
核心設計理念:"讓角色不做蠢事"
Travis McIntosh 在演講中提到了一句非常經典的話,也是整個 Hunter AI 設計的核心理念:
"讓角色不做蠢事比讓角色變聰明更重要。"
("Making sure characters don't do stupid things is more important than making them do smart things.")
這句話的含義是:玩家對一個 AI 的"聰明度"感知,很大程度上取決於它什麼時候不犯錯。 一個 AI 如果在玩家已經躲進掩體後還在原地站着不動,玩家會覺得它"蠢"。但如果它能在玩家消失後主動搜索、包抄或者等待,玩家就會覺得它"聰明"——哪怕它的行爲邏輯本質上還是 if-else 判斷。
所以《最後生還者》的 AI 團隊花了很多精力在防止 AI 做蠢事上:
避免 Hunter 在開闊地帶暴露
避免多個 Hunter 擠在同一個掩體後
避免 Hunter 在玩家已經繞到身後時還面朝前方 這些"不蠢"的行爲,比"聰明"的行爲更能提升玩家的遊戲體驗。
FSM/HFSM 的侷限性
在給出侷限性之前,先說句公允話:HFSM 確實緩解了狀態爆炸問題。 通過把狀態組織成層級,子狀態內部的轉移不需要與外部狀態一一連接。一個"戰鬥"子狀態機內部可以有 10 個狀態,但對外只表現爲一個"戰鬥"狀態——這大幅減少了頂層狀態之間的轉移線數量。
但 HFSM 也有它的結構性侷限:
子狀態間的轉移仍然需要顯式定義。 同一層級內的子狀態切換,仍然需要編寫轉移線和條件。新增一個子狀態,仍然需要考慮它和同層級其他狀態之間的所有轉移關係。
不能天然實現優先級搶佔。 如果一個 Hunter 正在"追擊"玩家,突然聽到手雷飛來——在 HFSM 中,需要從"追擊"狀態顯式寫一條轉移到"躲避"狀態的線,並在躲避完成後寫恢復邏輯。而在行爲樹中,這隻需靠 Selector 的排列順序隱式表達。
跨層級通信成本高。 底層 Behaviour 需要向頂層 Skill 報告執行結果,頂層需要向底層傳遞意圖參數。隨着層級加深,通信開銷增長。
Naughty Dog 用工程上的匠心克服了這些侷限——通過精心設計的優先級堆棧和 LISP 規則腳本,讓 Hunter AI 實現了接近行爲樹的優先級搶佔效果。 但這種方式依賴大量手動調優和規則編寫,而不是架構本身的優勢。 有沒有一種架構,能從根本上減少這些維護成本?
有。而且它已經在一款 2004 年的遊戲中被證明有效。
第二章:行爲樹的核心概念
從"改不動"到"搭積木"
在聊 Bungie 的選擇之前,我們需要先回答一個根本問題:
行爲樹到底解決了 FSM 的什麼痛點?
FSM 的三個根本矛盾
上一篇中我們詳細拆解了 FSM 的三大矛盾,這裏簡要回顧一下
改不動(狀態爆炸): 所有狀態攤在一個平面上。加一個新行爲,需要考慮它和每一個已有狀態的轉移關係。N 個狀態加 1 個新狀態,可能需要新增 N 條轉移線。狀態越多,修改成本越高。
走不遠(行爲組合困難): FSM 一次只能在一個狀態裏。想讓 AI"一邊後退一邊射擊一邊扔手雷"?你得新建一個"後退 + 射擊 + 扔手雷"的組合狀態。組合的數量隨行爲數量指數級增長。
看不懂(調試困難): 看到 AI 在做什麼容易(它當前在哪個狀態),但它爲什麼選了這個狀態不容易。狀態圖越大,理解"爲什麼 AI 此刻在做這件事"就越需要追蹤一大片轉移線。
行爲樹用一個根本不同的思路來解決這些問題。(~ ̄▽ ̄)~
行爲樹的核心概念——一家公司的決策體系
行爲樹把決策組織成一棵樹。 從根節點開始,沿着優先級從高到低的路徑一路走,找到第一個"當前應該執行的行爲"。 每幀從頭重新評估(Tick),確保 AI 永遠能響應最新的遊戲狀態。
在講解行爲樹的核心機制前,讓我們先請各位總裁來安排一家公司的決策體系:
打卡機(Root 節點): 每天準時啓動這家公司,但從不參與任何決策——"簽到成功"
部門總監(Selector 節點): 每天開無數次例會,從左到右檢查手裏的項目——"先看看項目 A 能不能推進?不能?那項目 B 呢?"
項目經理(Sequence 節點): 按步驟推進——"需求評審做完沒?好了?那進入開發階段……"
質檢員(Condition 節點): 只檢查不幹活——"預算批了嗎?批了,放行。沒批,打回去。"
基層員工(Action 節點): 真正動手幹活的——搓代碼、做設計、跑測試。
並行項目組(Parallel 節點): 同時推進兩個獨立任務——"營銷和開發同時開發,互不干擾。"
這套層級體系的精妙之處在於:每一層只關心自己該管的事,不越級。 打卡機不會去管員工代碼寫得怎麼樣——他只負責開啓美好的一天。 項目經理只管按步驟推進,不問"爲什麼要做這個項目"。 每個節點只關注自己的職責範圍,決策路徑清晰可追溯。
Running 狀態:行爲樹"可中斷性"的關鍵錨點
當一個節點返回 Running,父節點不會跳過它——但也不會被它"鎖死"。 如果父節點是一個 Selector,而更高優先級的兄弟節點的條件在下一幀變成了真,那麼當前 Running 節點會被搶佔(中止),高優分支啓動。
我們可以用打電話佔線來理解: 家長(父節點)在打電話(Running)。
如果有急事(高優先級事件)找家長,電話會被強行掛斷(Abort),家長去處理急事。
如果沒有急事,家長就繼續打他的電話。
搶佔的運作邏輯:
這就意味着:不需要顯式寫"中斷當前行爲"的轉移線,優先級由 Selector 的排列順序隱式表達。 後續的"現場改需求"章節會演示這個機制如何讓修改成本從"重構整個狀態圖"降爲"插一個新分支"ε(*′・∀・`)з゙。
中止策略(Abort):行爲樹搶佔機制的工程實現
上節提到"高優先級條件成立時,低優行爲會被自動中止"——但"自動中止"這個描述在工程實現上需要額外的機制來支撐。 這就是 Abort(中止策略) 的概念。
爲什麼需要 Abort?
考慮一個場景:AI 正在執行"走到掩體後"的動作(返回 Running),這時玩家突然從側面衝出來。 如果沒有 Abort,即使"射擊玩家"這個高優條件已經成立,AI 還是會堅持把"走到掩體後"這個動作執行完——這就產生了一個"遲鈍"的時間窗口。
Abort 讓行爲樹能在高優先級條件滿足時,同一幀內立即中斷當前正在運行的低優先級分支。 它不是等到"下一幀 Selector 重新評估"時才切換,而是即時響應。
三種 Abort 類型
在現代行爲樹引擎(如 Unreal Engine)中,Abort 有三種策略:
Self(自中止): 當前節點檢查自己的條件。如果條件不再滿足,自行中止。
示例:AI 正在"追擊玩家",但玩家超出了追擊距離——Self Abort 會立即終止追擊。
Lower Priority(低優先級中止): 當前節點運行時,如果有更高優先級的兄弟節點的條件變爲真,則中止當前節點。
示例:AI 正在"巡邏",突然檢測到"手雷飛來"——高優先級的"躲避手雷"分支觸發 Abort,立即中斷巡邏。
Both(兩者兼有): 同時啓用 Self 和 Lower Priority。這是 Unreal Engine 中 Selector 節點的默認 Abort 策略。
Observer Abort:更高效的實現
樸素的 Abort 實現需要每幀檢查所有節點的條件,這在高深度行爲樹中開銷不小。 Observer Abort(觀察者中止) 是一種優化策略:
當一個節點開始執行時,它會"註冊觀察"自己關心的條件變量(如"玩家距離"、"是否有手雷")。
只有當這些條件變量發生變化時,纔會觸發重新評估和可能的 Abort。
這避免了每幀遍歷所有條件的冗餘計算。
小結: Abort 策略是行爲樹"可中斷性"的工程基石。後續的"改需求"章節中,"插入一個新手雷躲避分支"之所以不影響已有行爲,正是得益於 Abort 機制的自動優先級裁決 (๑´`๑)。
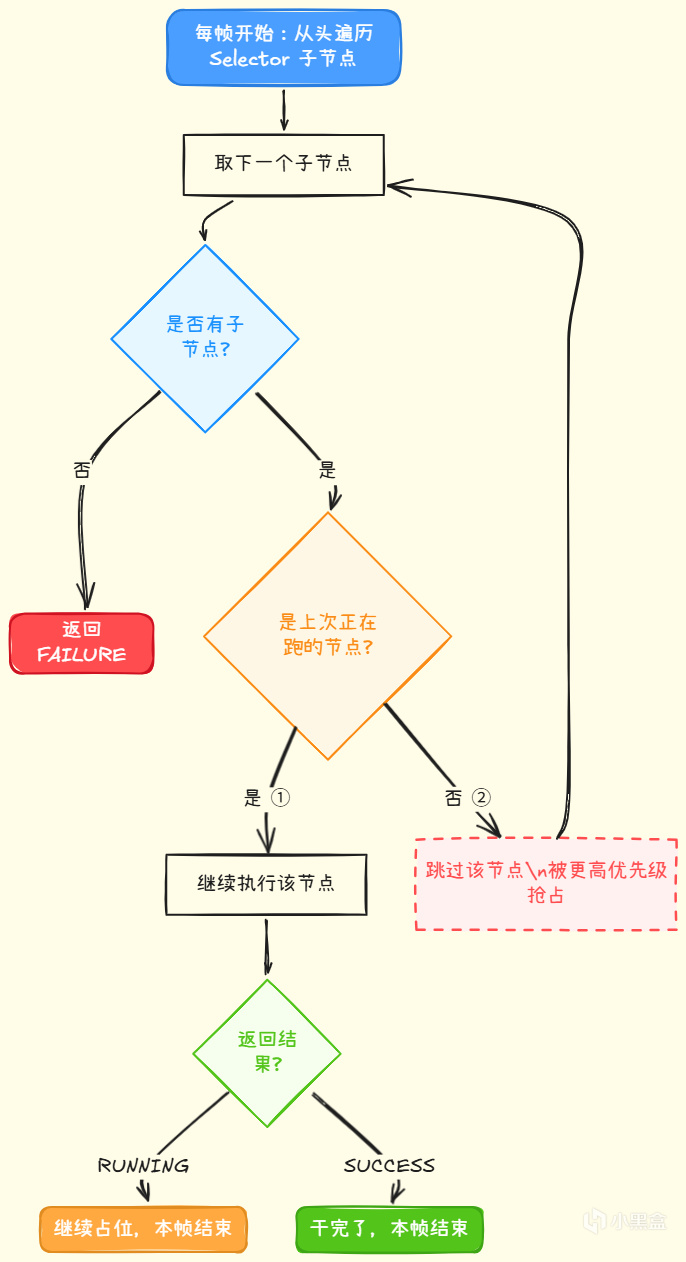
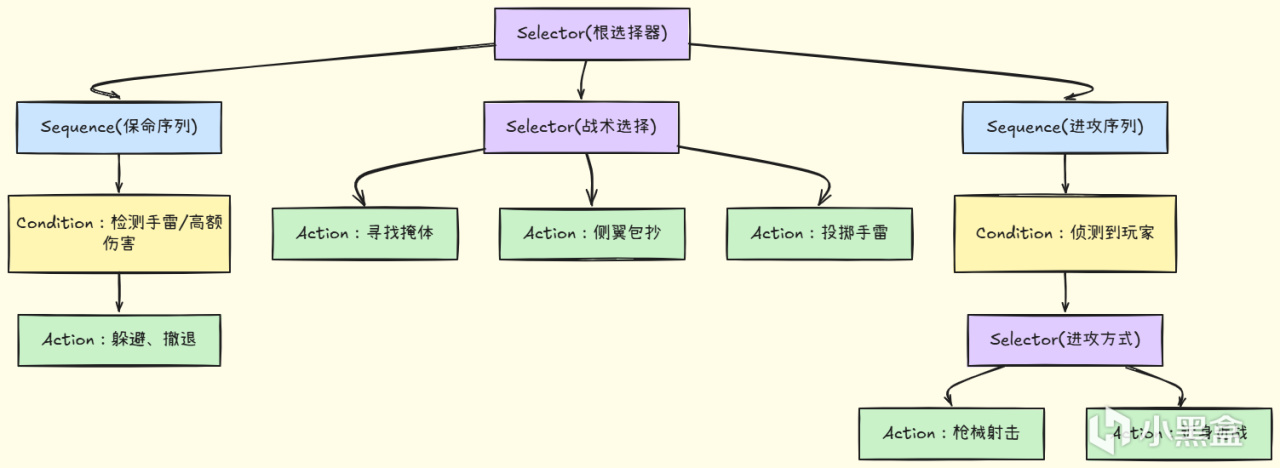
Selector 與 Sequence:兩種組合邏輯(Memory 版本)
Selector(選擇器)和 Sequence(順序器)是行爲樹中最核心的兩種組合節點。
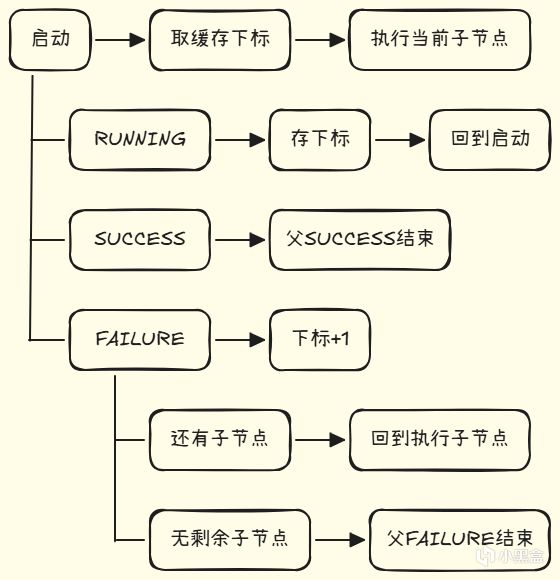
說明: 以下展示的是 Memory Selector / Memory Sequence 的行爲——這是現代遊戲引擎(如 Unreal Engine)的默認實現方式。標準 Selector/Sequence 在每一幀會從頭嘗試,而 Memory 版本會"記住"上次運行的子節點位置,下一幀從該位置繼續,避免重複執行已成功的子節點。兩者的核心邏輯一致,差異僅在於是否需要保留執行狀態。
Selector 的邏輯是"選一個能幹的": 從左到右嘗試子節點,停在第一個返回 Success 或 Running 的那一個。如果子節點返回 Failure,則繼續嘗試右邊下一個。
Selector
Sequence 的邏輯是"按步驟走完": 從左到右依次執行子節點,遇到 Failure 立即停止,全部 Success 纔算整體成功。
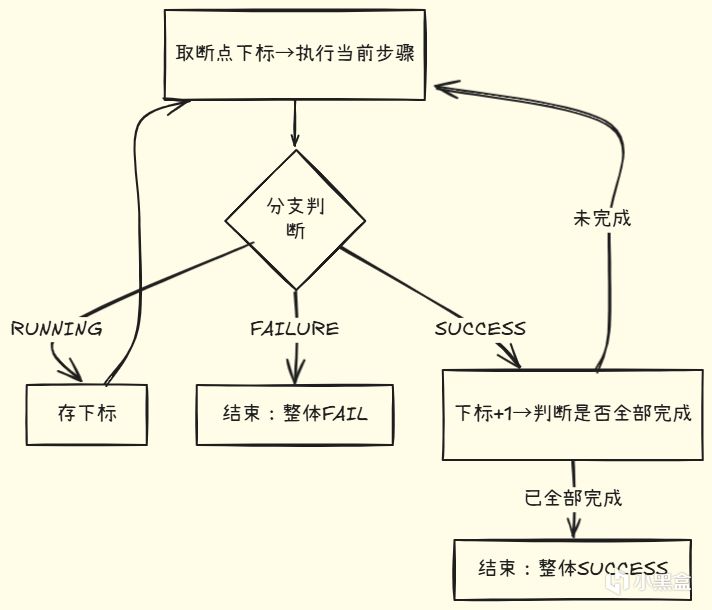
Selector 管優先級 / 選擇性(選哪個方案),Sequence 管步驟 / 順序性(方案內的步驟怎麼走)。兩者組合使用,就構成了一棵完整的決策樹。
耄耄沒有地方放了
不過行爲樹不是在所有方面都比 FSM 好。 如果你的 AI 只有 5 個狀態,FSM 寫起來更快、跑起來更快、調試起來更簡單。 但當狀態數超過 15 個、行爲需要靈活組合、開發過程中需求頻繁變更時,行爲樹的結構性優勢就會顯著體現出來(≧∀≦)ゞ。
第三章:《光環 2》
第一次在 3A 遊戲裏證明"樹形結構"有效
2004 年,《光環 2》發售。 2005 年,Bungie Studios 的 AI 程序員 Damian Isla 在 GDC 上發表了一個演講:《Handling Complexity in the Halo 2 AI》。
這個演講能成爲遊戲 AI 領域的經典文獻,不是因爲它介紹了什麼全新的學術理論——而是因爲它第一次在 3A 遊戲裏大規模展示了樹形優先級決策結構的實際效果。
嚴格來說,《光環 2》用的不是現代意義上標準化的行爲樹(缺少 Tick / 返回狀態等標準機制),而是一種叫做 Objective Tree(目標樹) 的架構。 這是 Damian Isla 在 GDC 2005 演講中使用的正式術語。 它運行在 HFSM(分層有限狀態機)框架內,是一種聲明式的樹形結構,用來管理 AI 目標的優先級和複用。 它是行爲樹概念的前身和早期變體,第一次在商業遊戲裏證明了"樹形優先級結構"的有效性,直接啓發了後來行爲樹在遊戲開發中的廣泛採用。
Covenant 敵人的戰術行爲
在《光環 2》中,Covenant 陣營的敵人(精英戰士 Elite、咕嚕人 Grunt、豺狼人 Jackal 等)展現出了讓人印象深刻的戰術行爲。
先看進攻和撤退——敵人會根據戰況判斷是該衝上來打,還是退回去找掩體。 不是固定腳本,而是根據當下情況自己做決定。
再看團隊配合。多個敵人會協同行動:有的正面吸引火力,有的繞到玩家側翼包抄。 這不是預先編排的動畫,而是每個敵人獨立決策的結果。
還有一些細節也很到位:
投擲手雷不是盲目亂扔,而是會考慮落點和玩家的掩體位置。
不同兵種有不同風格:Elite 更主動攻擊,Grunt 更容易恐慌逃跑,Jackal 更擅長用能量盾防守。
這些行爲在玩家看來非常"智能",但底層邏輯其實並不複雜: 樹形優先級結構讓每個敵人都能根據當前環境條件,自主決定最合適的行爲。
Tick 機制在《光環 2》中的實際體現
雖然《光環 2》的架構不完全等同於現代行爲樹,但它已經包含了 Tick 機制的核心思想: 每幀重新評估戰術優先級。
這意味着敵人的決策不是一次性做出的。
它不是在"追擊"狀態裏一路追到底。 而是每一幀都在問自己:"我現在應該繼續追擊嗎?還是該找掩體?還是該扔手雷?"
如果戰況變化(比如玩家繞到了側翼),AI 在下一幀就能調整行爲。
這種"每幀重新評估"的機制,是讓 AI 看起來"靈活"和"聰明"的關鍵。 玩家感覺敵人"會根據戰況調整策略",本質上是因爲敵人的決策樹在每一幀都在重新運行。
Selector / Sequence 的實際應用
在《光環 2》的行爲架構中,優先級裁決和步驟執行的邏輯已經初具雛形。
優先級裁決(類似 Selector): 敵人先檢查"有沒有手雷飛來?"(高優)。有的話執行"躲避"。沒有則檢查"能不能攻擊玩家?"(中優)。能的話執行"攻擊"。不能的話檢查"該不該找掩體?"(低優)。
這種優先級結構天然支持搶佔——高優條件成立時,低優行爲會被自動中止。
步驟執行(類似 Sequence): 當決定"投擲手雷"時,敵人需要按步驟執行:拾起手雷 → 瞄準 → 投擲 → 返回戰鬥。
任何一個步驟失敗(比如手雷被玩家打掉),整個序列就終止,AI 回到優先級裁決重新選擇行爲。
Objective Tree 的行爲複用機制
《光環 2》架構中另一個值得注意的設計是 Objective Tree 的共享節點引用機制。
在傳統 FSM 中,每個狀態是獨立的,行爲不能複用。"找掩體"這個行爲如果被"躲避手雷"和"尋找戰術位置"兩個場景需要,就得寫兩份代碼。
在 Objective Tree 中,行爲可以作爲子節點被多個父節點引用。 "找掩體"行爲只寫一次,可以被"躲避"、"進攻"、"撤退"等多個分支調用。 這就減少了代碼重複,也讓行爲修改(比如優化"找掩體"的算法)能同時惠及所有調用它的分支。
Objective Tree 的共享節點引用是實現行爲複用的早期方案。 現代行爲樹引擎(如 Unreal Engine 的 Behavior Tree)通過不同的機制(如 Compound 節點、子樹引用)實現了類似的可複用性。
第四章:《全境封鎖》
"改需求"時的行爲樹優勢
如果說《光環 2》證明了行爲樹"能做複雜 AI",那麼 Massive Entertainment 在《全境封鎖》(Tom Clancy's The Division, 2016)中的實現則證明了它"能在大規模 NPC 開發中管理複雜度"。 發售時《全境封鎖》的 AI 表現中規中矩,但其行爲樹工具鏈和架構設計在 GDC 演講中得到了業界的認可,尤其在多模板、多派閥的行爲管理方面提供了有價值的實踐經驗。
2016 年,Massive Entertainment 的 Philip Dunstan 和 Drew Rechner 在 GDC 上發表了演講:《Blending Autonomy and Control: Creating NPCs for Tom Clancy's The Division》。
這個演講的核心主題不是行爲樹的技術細節——而是如何用行爲樹來管理大規模、多派閥、多模板的 NPC 行爲開發。
11 種 AI 模板 + 4 個派閥
《全境封鎖》的 NPC 系統規模相當龐大:
11 種 AI 模板: Assault(突擊)、Rusher(衝鋒)、Sniper(狙擊)、Thrower(投擲)、Controller(控制)、Heavy Weapons(重武器)、Tank(坦克)、Leader(領袖)、Support(支援)、Special(特殊)等。
4 個派閥: Rioters(暴徒)、Cleaners(淨化者)、Rikers(瑞克幫)、Last Man Battalion(最後營)。其中 LMB 有標準和高強度兩種配置,所以 4 個派閥合計 5 種 AI 變體。
每個派閥有自己的特色行爲:
Rioters 更像暴民——衝動、喜歡近戰、容易恐慌。
Cleaners 則是軍事化組織——配合默契、善於利用掩體、會使用火焰武器。
Rikers 喜歡用毒氣和近戰。
LMB 則是訓練有素的士兵——包抄、壓制、戰術撤退樣樣精通。
如果要用 FSM 來實現這套系統,每個派閥 × 每個模板都需要獨立的狀態圖。 11 模板 × 5 派閥 = 55 個變體。 每個變體如果有 15 個狀態,就是 800 多個狀態定義。 狀態之間的轉移線?上千條。 維護成本可想而知( >﹏<。)。
行爲樹如何解決規模問題
行爲樹的解決方案是模塊化組合:
基礎行爲(找掩體、移動、瞄準、射擊)寫一次,所有模板和派閥共用。
派閥特色通過不同的行爲樹配置實現:Rioter 的行爲樹裏"近戰衝鋒"的優先級更高,LMB 的行爲樹裏"包抄"的優先級更高。
模板特色通過參數調整實現:Sniper 的"射擊距離"參數更大,Tank 的"血量閾值"參數更高。
這種架構的核心優勢是: 新增一個模板不需要重寫已有代碼,只需要種一棵新的行爲樹(或調整已有行爲樹的參數)。
可視化編輯器 + 運行時調試工具
Massive Entertainment 搞了一套專有的行爲樹可視化編輯器,讓設計師(不僅僅是程序員)可以創建和修改 NPC 行爲。
編輯器支持:
拖拽節點構建行爲樹
實時預覽行爲樹執行流程
運行時調試:在遊戲運行過程中觀察 AI 當前執行到樹的哪個節點
這套工具鏈是行爲樹在實際項目裏落地的重要保障。 沒有可視化工具,行爲樹的"可讀性"優勢就大打折扣——設計師需要看代碼才能理解 AI 的邏輯。 有了工具,設計師可以直接在編輯器裏看到"AI 正在執行哪個行爲"、"爲什麼 AI 選了這條分支而不是那條"。
FSM vs 行爲樹:現場改需求的工作量對比
這是最能體現行爲樹價值的場景。
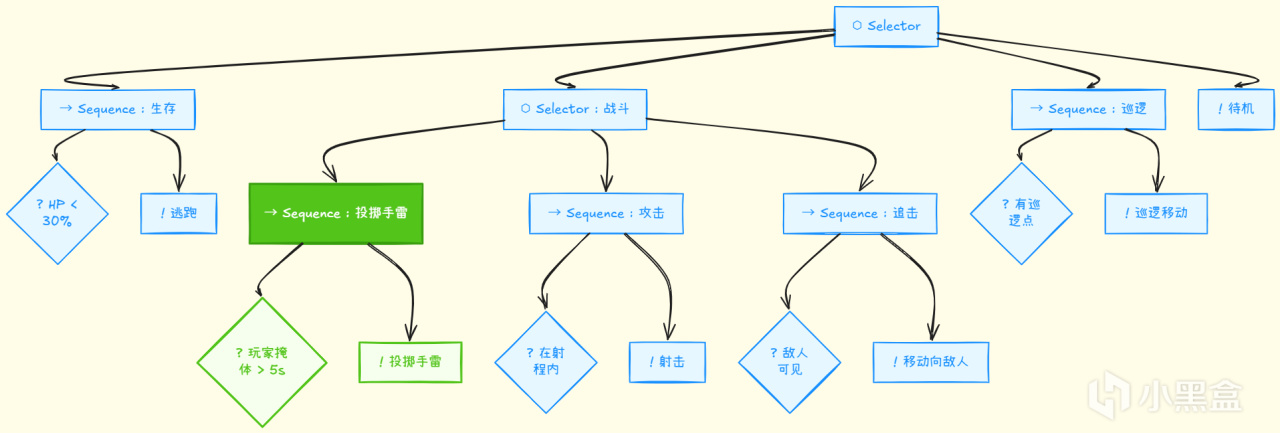
假設開發進行到中期,策劃提出了一個新需求: "當玩家在掩體後超過 5 秒時,敵人應該投擲手雷把玩家逼出來。"
用 FSM 實現這個需求:
新增一個"投擲手雷"狀態。
從每一個可能進入"戰鬥"的狀態(巡邏→發現玩家→追擊→戰鬥→躲掩體→……)畫一條轉移到"投擲手雷"的線。假設涉及 5 個已有狀態,就是 5 條新轉移線。
在每條轉移線上寫條件:"玩家在掩體後 > 5 秒"。
考慮"投擲手雷"完成後的轉移:回到戰鬥?回到追擊?回到躲掩體?
考慮併發問題:如果"投擲手雷"和"被手雷炸"同時觸發,誰優先?
測試:確保每條新轉移線在所有場景下都能正確觸發,不會和已有轉移線衝突。
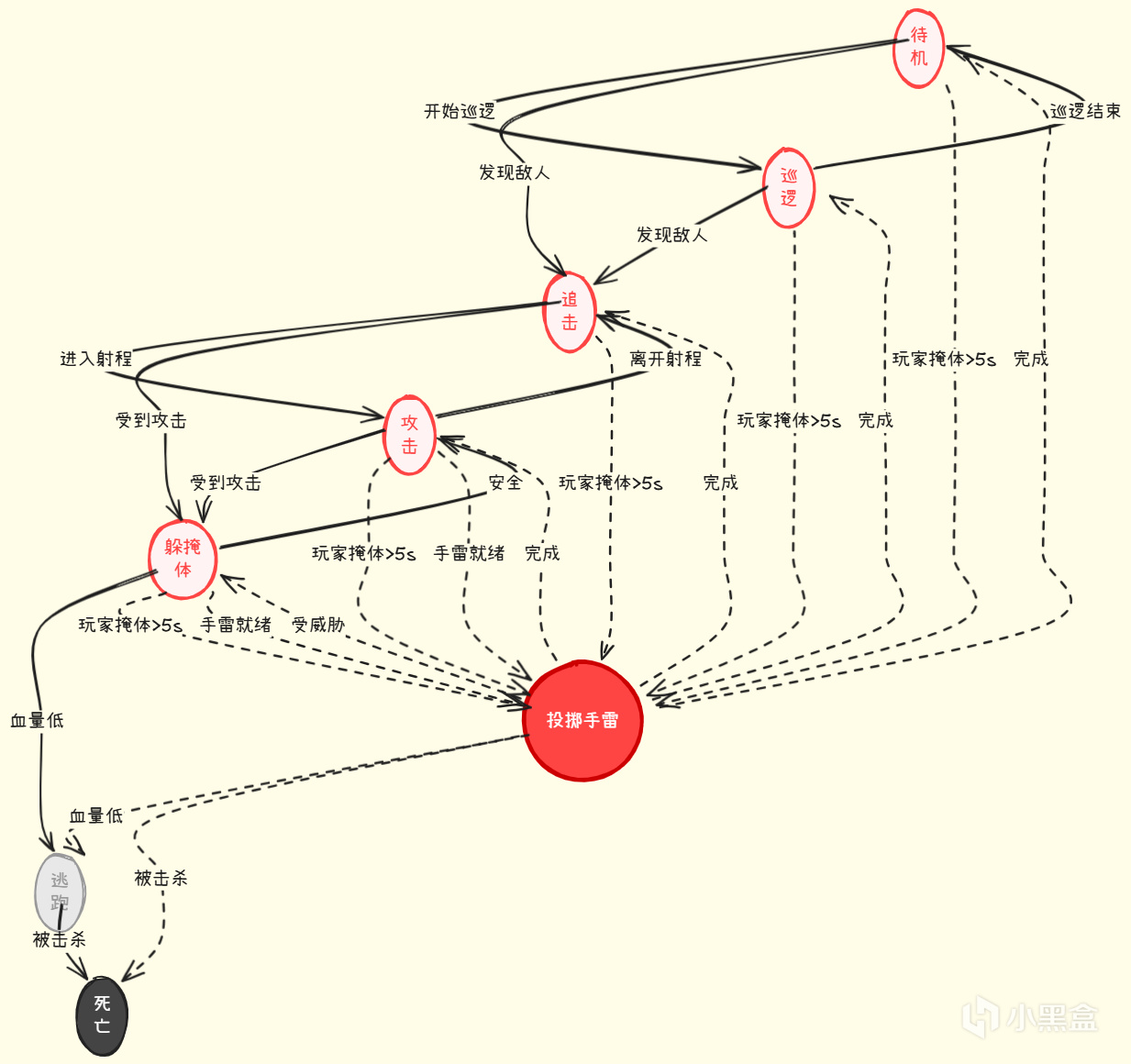
過於複雜實在畫不出來了
用行爲樹實現這個需求:
在 Selector 的"戰鬥"分支下,插入一個新的 Sequence 子節點。
這個 Sequence 包含兩個子節點:Condition("玩家在掩體後 > 5 秒?")→ Action("投擲手雷")。
完成。0 個已有節點被修改。
這個多清爽
這就是爲什麼 Massive Entertainment 選擇了行爲樹——不是因爲 FSM 做不出《全境封鎖》的 AI 效果。 而是因爲在大規模、多模板、多派閥的開發過程中,行爲樹的修改成本遠低於 FSM(u‿ฺu )。
第五章:《F.E.A.R.》
兩種思路,一個選擇
上一篇中我們簡要提到了 GOAP,說它用"三個狀態 + 一個規劃器"的架構把 FSM 壓縮到了極致。 這裏展開詳述——因爲 GOAP 是行爲樹之外,另一條解決 FSM 侷限性的有效路徑。
在討論遊戲 AI 時,如果不提《F.E.A.R.》(First Encounter Assault Recon, 2005),那就像講操作系統不提 Linux 一樣不完整。
Monolith Productions 的 AI 程序員 Jeff Orkin 在 GDC 2006 上發表了演講:《Three States and a Plan: The A.I. of F.E.A.R.》。 這個演講介紹了一種完全不同於 FSM 和行爲樹的 AI 架構: GOAP(Goal-Oriented Action Planning,面向目標的動作規劃)。
而這套系統之所以讓人印象深刻,不是因爲它用了什麼高深的算法——恰恰相反,它的狀態機部分只有三個狀態: Jeff Orkin 在演講中使用的命名是 Goto / Animate / Use Smart Object:
Goto(移動): 移動到目標位置。
Animate(動畫): 執行具體動作(射擊、換彈、翻越掩體、投擲手雷等)。
Use Smart Object(使用場景物體): 與環境中的智能對象交互。
Jeff Orkin 在演講中提到,Use Smart Object本質上是 Animate 的一個特化版本——所以在某些實現中,底層狀態機實際上只有兩個狀態。 是的,三個狀態。
但就是這個看起來"過於簡單"的狀態機,驅動了遊戲中那些讓無數玩家驚呼"這 AI 也太聰明瞭吧"的敵人行爲。
GOAP 的核心思想:規劃器 + 原子動作
GOAP 的魔法不在於狀態機,而在於它背後的規劃器(Planner)。
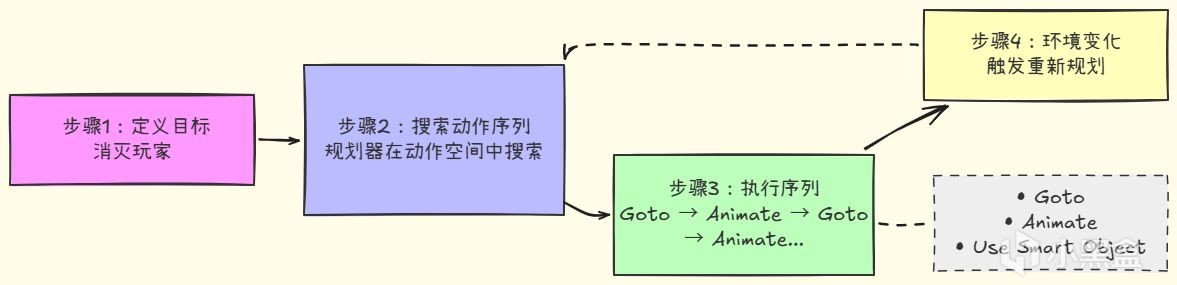
規劃器的工作原理是這樣的:
定義目標(Goal): 比如"消滅玩家"、"找到掩體"、"換彈夾"。
定義原子動作(Action): 每個動作有前置條件(Precondition)和後置效果(Effect)。比如"射擊"的前置條件是"槍裏有子彈 and 能看到玩家",後置效果是"玩家受傷"。
規劃(Plan): 規劃器從當前狀態出發,搜索一條動作序列,使得執行完這條序列後能達到目標。這本質上是一個搜索問題。
執行(Execute): 將規劃出的動作序列交給狀態機逐個執行。如果執行過程中環境變化導致規劃失效,重新規劃。
舉個具體例子。假設敵人的目標是"消滅玩家",但槍裏沒有子彈了:
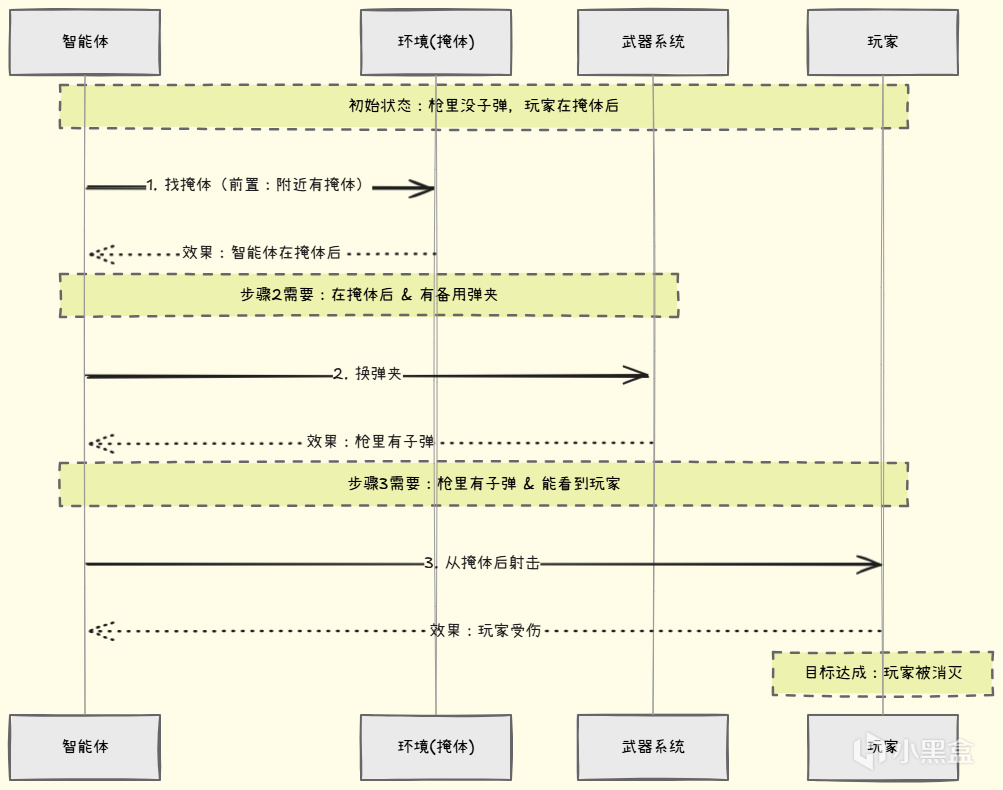
當前狀態:槍裏沒子彈,玩家在掩體後
目標:消滅玩家(҂‾ ▵‾)︻デ═一
規劃結果:
找掩體(前置條件:附近有掩體 → 效果:在掩體後)
換彈夾(前置條件:在掩體後 and 有備用彈夾 → 效果:槍裏有子彈)
從掩體後射擊(前置條件:槍裏有子彈 and 能看到玩家 → 效果:玩家受傷)
如果換彈夾的過程中玩家繞到了側面,規劃器會重新規劃: 也許變成"扔手雷"而不是"射擊",因爲前置條件滿足了(手雷在包裏 and 玩家在投擲範圍內)。
爲什麼 F.E.A.R. 的敵人給人感覺"極其聰明"
F.E.A.R. 的敵人之所以給玩家留下深刻印象,有幾個關鍵原因:
動態規劃帶來不可預測性。 敵人不是按照預設的腳本行動,而是根據當前環境實時規劃。同樣的初始狀態,如果玩家的走位不同,敵人的應對策略也可能不同。這種"不可預測但合理"的行爲,最接近玩家對"智能"的定義。
環境利用能力。 GOAP 的原子動作可以引用環境信息——"附近有掩體"、"有手雷可用"、"有高臺可以佔據"。規劃器會自動選擇利用這些環境要素的動作序列。玩家覺得敵人"會用環境",其實是因爲規劃器搜索出了利用環境的最優路徑。
團隊配合的幻覺。 多個敵人使用相同的 GOAP 系統,它們會根據各自的環境條件做出不同的規劃。一個敵人正面射擊吸引注意力,另一個敵人繞到側翼——這在玩家看來是"團隊配合",但本質上只是兩個獨立的規劃器各自做出了當前最優的決策。
補充: 網上有一些文章把《中土世界:暗影魔多》中的"湧現式敘事"歸因於 GOAP,這是不準確的。Nemesis System(宿敵系統)的核心是一套角色關係追蹤 + 動態敘事生成系統,與 GOAP 的規劃機制不同。GOAP 擅長的是單個 AI 的行爲規劃,湧現式敘事則需要額外的系統來追蹤角色間的關係和事件歷史。
GOAP 與 行爲樹對比
GOAP 是給 AI 裝了個大腦,讓它自己想(靈活但難控)。 行爲樹則是給了 AI 一本操作手冊,讓它照着做(死板但穩定)。

GOAP 爲什麼沒有成爲主流?
GOAP 看起來很香,但它有幾個實質性的侷限:
性能開銷大。 規劃是一個搜索問題。當動作數量多、環境條件複雜時,規劃可能需要顯著的計算時間。不過,業界已有多種優化方案——包括分層規劃、增量規劃、以及規劃結果緩存。在合理的優化下,GOAP 的性能開銷是可以接受的。
調試困難。 當 AI 做出"蠢行爲"時,你需要理解規劃器爲什麼選擇了這條動作序列——是前置條件定義有誤?還是搜索算法找到了次優路徑?這比行爲樹的"這個分支爲什麼沒走到"難定位得多。這是 GOAP 最實際的障礙。
行爲不可控。 規劃器可能組合出設計師沒有預料到的行爲序列——其中有些可能是 bug。行爲樹中,AI 只能做樹裏定義好的事。對於需要精確控制難度曲線的遊戲(如魂系),這一點尤其關鍵。
環境建模複雜。 每個動作都需要精確定義前置條件和後置效果。維護一套完整的"動作-條件-效果"知識庫本身就是一項大工程。
正是因爲這些侷限,GOAP 在實際商業遊戲中的採用率遠不如行爲樹。 但這不意味着 GOAP 沒有價值——在需要高度自適應行爲的場景(如沙盒遊戲、模擬類遊戲)中,GOAP 的規劃能力是行爲樹難以替代的。
遊戲 AI 的首要任務不是"變聰明",而是"爲玩家提供有趣的挑戰"——這通常需要精確控制 AI 的行爲範圍和強度,而這正是行爲樹的優勢領域┐(´д`)┌。
第六章:《恥辱 2》
爲什麼沉浸式模擬遊戲不用行爲樹?
沉浸式模擬遊戲(Immersive Sim)對 AI 的要求,幾乎是所有遊戲類型中最極端的。
爲什麼? 因爲沉浸式模擬遊戲的核心設計理念是"給玩家提供多種解決問題的方式"。
在《恥辱 2》(Dishonored 2, 2016)中:
玩家可以正面突突突
可以潛行繞過所有敵人
可以用超能力瞬移到敵人身後暗殺
可以把敵人引到一起讓他們互相誤傷
可以黑入敵人的通訊系統讓他們自相殘殺……
玩家的玩法是不可預測的。 AI 系統必須能應對設計師自己都可能沒有想到的玩家行爲組合。
2017 年,Arkane Studios 的 Laurent Couvidou 和 Xavier Sadoulet 在 GDC 上發了演講:《Taking Back What's Ours: The AI of Dishonored 2》。 這個演講展示了一個面對極端玩家行爲時,AI 系統是怎麼設計和演進的。
規則引擎 vs 行爲樹:Arkane 的選擇
GDC 2017 演講原文顯示,Arkane 的《恥辱 2》AI 決策核心是規則引擎(Rule System)而非行爲樹。
爲什麼沉浸式模擬遊戲選擇了規則引擎? 因爲沉浸式模擬需要"去中心化"的響應機制。
規則引擎的核心特徵是:
規則可以獨立定義、獨立評估、獨立觸發。
不需要像行爲樹那樣受限於固定的樹形結構。
當玩家做出完全出乎意料的行爲時,規則系統可以通過新增規則來應對,而不需要重構整棵樹。
這正是《恥辱 2》面對"不可預測的玩家"時的最佳選擇。
應對"不可預測的玩家"
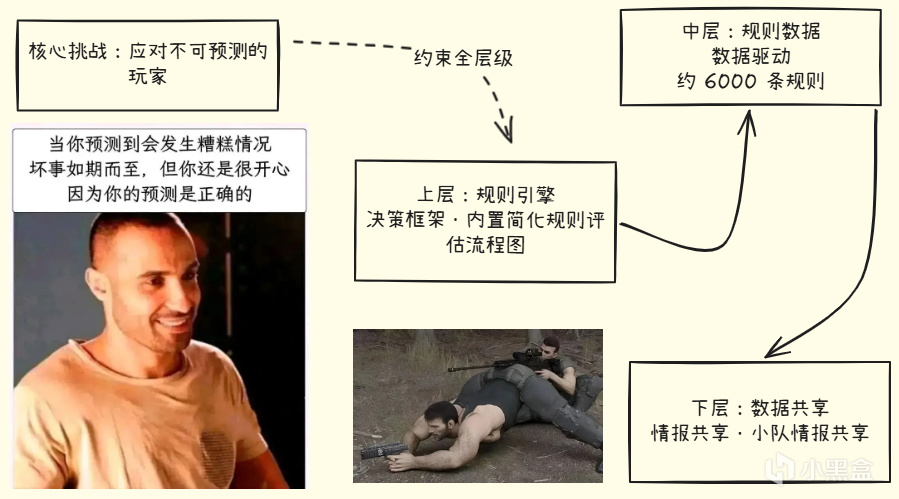
《恥辱 2》的 AI 面臨的最大挑戰是玩家超能力的不可預測性。 玩家可能同時使用"時間減速 + 瞬移 + 附身"的組合,也可能把整個場景的物品都變成炸彈。 AI 需要在完全無法預料玩家行爲的前提下,仍然做出合理的反應。
Arkane 的解決方案是基於規則引擎的決策系統:
總共約 6000 條規則: GDC 2017 演講原文列出了 5 組數據(4609、373、596、204、246 條),加起來差不多 6000 條,涵蓋 NPC 行爲、戰鬥策略、對話動畫等多個方面。
數據驅動配置: 這些規則不是硬編碼的——它們是數據驅動的。規則作爲配置數據存在,規則引擎根據當前情境評估並選擇最合適的行爲。這意味着設計師可以在不修改代碼的情況下調整 AI 的行爲。
小隊成員間的情報共享
《恥辱 2》的敵人小隊有一個精妙的設計:情報共享系統。
當一個小隊成員發現玩家時,它不會獨自追擊——它會把玩家的位置信息分享給小隊其他成員。 其他成員收到信息後,會根據各自的位置和狀態做出響應:有的從正面壓制,有的從側翼包抄,有的呼叫增援ᕕ( ᐛ )ᕗ。
這套系統的核心是數據共享機制——規則引擎的每條規則都可以讀取和寫入共享的情報數據。 當一個成員寫入"玩家位置:X, Y, Z"時,其他成員的規則在下一輪評估時就能讀取到這個信息並觸發響應。 這與行爲樹中的"黑板"(Blackboard)概念類似,但實現方式更靈活——規則引擎不需要固定的樹形結構來組織數據讀寫。
複雜系統的"暗坑"
但 Arkane 在實現過程中也發現了一些"暗坑"——那些在理論上很美好、在實踐中卻很棘手的問題:
規則數量爆炸。 6000+ 條規則聽起來很壯觀,但每一條規則都需要測試、驗證、調試。當規則之間存在衝突或優先級不明確時,AI 可能做出不合理的行爲。規則越多,衝突的可能性越大。
決策深度控制。 規則系統可以無限複雜地嵌套——規則引用規則,條件疊加條件……深度超過 5 層後,系統的可讀性急劇下降。調試一個 10 層深的規則鏈,和理解一個 50 個狀態的狀態圖一樣痛苦。
性能優化。 《恥辱 2》的規則評估系統開銷不小——尤其是當場景中有大量 NPC 時。Arkane 需要實現優先級裁剪(低優先級規則在特定條件下跳過評估)、評估頻率調整(不同 NPC 以不同頻率評估規則)、以及觀察者模式(只有情境數據變化時才重新評估相關規則)等優化手段。
數據驅動的雙刃劍。 規則作爲配置數據雖然靈活,但也意味着 bug 可能不在代碼裏而在數據裏。"AI 爲什麼不躲避"可能不是因爲規則邏輯有 bug,而是因爲某條規則的優先級配錯了。這類 bug 往往更難定位。
這些"暗坑"不是某個特定架構的根本缺陷,而是任何複雜系統都會面臨的工程挑戰。 無論是行爲樹、規則引擎還是 GOAP,框架之上仍然需要精心的工程實踐來保證系統的穩定性和可維護性(;´д`)。
第七章:行爲樹的陷阱
那些暗坑
行爲樹不是銀彈。
No Silver Bullet. ——Fred Brooks
有銀彈也不代表能殺掉吸血鬼
你在文檔裏看到的都是"行爲樹多麼優雅、多麼好擴展"——但實際項目中,行爲樹有自己的調試地獄。
這裏單闢一小節,討論行爲樹在工業實踐中最常遇到的三個"暗坑"。
暗坑一:條件抖動(Condition Jitter)
當一個高頻變化的 Condition 節點導致 AI 在兩個行爲之間高頻來回切換時,AI 的表現可能比 FSM 更"智障"。
舉個例子。 AI 的行爲樹頂層有兩個分支:
分支 1(高優):玩家距離 < 10m → 近戰攻擊
分支 2(低優):玩家距離 >= 10m → 遠程射擊
如果玩家剛好站在 10m 的邊界上晃動,AI 會在"近戰攻擊"和"遠程射擊"之間每幀切換。 玩家看到的效果就是:AI 像個癲癇患者一樣抽搐——往前衝一步又退回來,舉槍又放下。
怎麼解決?
加遲滯(Hysteresis): 近戰觸發距離 8m,退出距離 12m。中間留一個"緩衝區"。
降低 Condition 評估頻率: 不是每幀都檢查,而是每 0.5 秒檢查一次。
使用 Service 節點的 Tick 間隔控制: 不要讓 Service 每幀都跑。
暗坑二:Running 節點泄漏
一個永遠返回 Running 的節點會讓 AI"卡死"在一個行爲上,永遠無法被搶佔。
舉個例子。 你寫了一個"移動到目標位置"的 Action 節點。如果目標位置永遠不可達(比如被牆擋住了),這個節點會一直返回 Running。
結果: AI 卡在一個永遠到不了的位置,所有更高優先級的分支都被它佔着位置,無法觸發。 玩家看到的效果就是:AI 對着一面牆發呆,玩家走過去把它打死它都不動。
怎麼解決?
給所有 Running 節點加超時機制。 如果超過 N 秒還在 Running,強制返回 Failure。
用 Blackboard 記錄"嘗試過但失敗的位置",避免重複嘗試。
代碼審查時重點檢查所有可能永遠 Running 的節點。
暗坑三:深層樹的重入問題
當行爲樹深度超過 5-6 層時,同一幀內的 Tick 遍歷可能出現"重入"——一個節點在同一幀內被多次執行。
這在 Parallel 節點和嵌套 Selector/Sequence 的組合中尤其常見。
舉個例子。 你有一個 Parallel 節點,兩個子分支都引用了同一個"播放動畫"的子樹。如果這個子樹內部有狀態修改(比如設置 Blackboard 變量),同一幀內兩次執行可能導致狀態覆蓋。
結果: AI 播放了錯誤的動畫,或者 Blackboard 數據被意外覆蓋。
怎麼解決?
避免在行爲樹中共享可變狀態。 如果必須共享,確保它是冪等的。
限制行爲樹深度。 超過 5-6 層時考慮拆分成多棵子樹。
在調試工具中標註"重入風險節點"。
第八章:總結
寫到這裏,我們已經走過了從《最後生還者》的 HFSM,到《光環 2》的早期行爲樹實踐,再到《全境封鎖》的大規模行爲樹應用,以及 GOAP 的替代方案和《恥辱 2》的極端場景挑戰。
現在是時候回答一個核心問題了: 行爲樹到底是神器,還是又一個被過度吹捧的技術?
技術演進的啓示
回顧整個技術演進歷程,有幾個清晰的趨勢:
從"能做什麼"到"能改什麼"。 FSM 的瓶頸不是功能不夠——理論上 FSM 可以模擬任何行爲樹的邏輯。它的瓶頸是修改成本。當狀態數超過某個閾值,加一個行爲的成本變得不可接受。行爲樹解決的正是這個問題——它讓新增行爲的成本從 O(N) 降爲 O(1)。
從"單體決策"到"分層架構"。 《最後生還者》的 Skills Priority Stack + Behaviours 兩層架構,本質上是把決策和執行解耦。行爲樹的 Selector / Sequence 組合機制,則是把優先級和步驟解耦。分層解耦是管理複雜度的通用方法。
從"硬編碼"到"數據驅動"。 《全境封鎖》的行爲樹配置、《恥辱 2》的規則系統,都體現了同一個趨勢——把 AI 行爲從代碼中抽離出來,變成可配置的數據。這讓設計師(不僅僅是程序員)可以參與 AI 調優,也讓迭代速度大幅提升。
2020 年代的新趨勢:混合架構
進入 2020 年代後,遊戲 AI 架構呈現出明顯的混合化趨勢——不再追求"用一種架構解決所有問題",而是根據場景組合使用多種技術:
Utility AI + 行爲樹混合。 《模擬人生》(The Sims)系列長期使用的 Utility AI 在近年受到更多關注——它的核心是"給每個可選行爲打分,選最高分",就像 Sim 們會根據飢餓、社交、娛樂等需求的緊急程度自動決定"先去喫飯還是先去社交"。現代實踐中,常見的模式是用 Utility AI 做高層決策(選哪個行爲),用行爲樹做底層執行(行爲的具體步驟)。這種組合兼顧了靈活性和可控性。
更好的行爲樹案例。 如果你想了解行爲樹在現代遊戲中的表現,以下幾個案例值得研究:
《Alien: Isolation》(2014): 異形 AI 使用雙層 AI 系統——"導演 AI"(知道玩家位置但不可直接攻擊)控制"異形 AI"(不知道玩家位置但會搜索),行爲樹在其中扮演了關鍵角色(Mike Lipshaw, GDC Europe 2015)。
《Halo 3》(2007): Bungie 在《光環 2》的基礎上進一步進化了行爲樹架構,增加了更完善的並行行爲支持和更精細的優先級控制。
《地平線:零之曙光》(2017): Guerrilla Games 的機器獸 AI 使用了複雜的行爲樹系統,不同機器獸有不同的行爲樹配置,支持動態行爲切換。
機器學習輔助 AI。 雖然深度學習尚未取代傳統的基於規則的 AI 架構(因爲可控性要求),但在特定子任務上已有應用——如《Forza Motorsport》中的駕駛 AI 使用了強化學習來優化賽車線。
核心趨勢總結: 遊戲 AI 正在從"單一架構之爭"走向"實用主義混合"。選擇哪種架構不再是信仰問題,而是工程問題——根據項目需求、團隊技能和開發週期做出最務實的選擇。
行爲樹的核心價值和代價
核心價值:
可中斷: 優先級搶佔不需要顯式寫中斷邏輯。
可複用: 行爲節點可以被多個分支引用(DAG 結構)。
可擴展: 新增行爲只需要插入新分支,不影響已有節點。
可讀性: 樹形結構直觀反映決策邏輯。
可調試: 可以實時觀察 AI 的執行路徑。
代價:
學習成本: 理解 Tick 機制、Selector / Sequence 邏輯、Running 狀態的搶佔行爲,需要一定的學習投入。
運行時開銷: 每幀遍歷樹比狀態查詢開銷大。需要優化(Observer Abort、Tick 頻率調整等)。
調試複雜度: 深度嵌套的行爲樹同樣難以理解。Parallel 節點會增加調試難度。
過度設計的風險: 不是所有 AI 都需要行爲樹。簡單 AI 用行爲樹是殺雞用牛刀。
技術選型決策框架
如果你在開發一款遊戲,在 FSM 和行爲樹之間猶豫,可以參考這個決策框架。
注意: 這個框架沒有考慮最關鍵的現實變量——團隊能力。 一個對 FSM 有豐富經驗、有完善自研調試工具的團隊,和一個熟悉 UE4 行爲樹但缺乏深入理解的新手團隊,他們的技術選型會截然不同。 架構選擇從來不只看技術優劣,更要看團隊能不能駕馭它。

沒有最好的架構,只有最適合當前項目需求的架構。 行爲樹不是通解——它只是管理 AI 複雜度的一個工具。 用好它的前提是理解它的優勢和代價,然後在合適的場景下使用它。
下期預告
如果你已經讀到這裏,說明你對遊戲 AI 這個話題是真的感興趣。
下一期,我們會聊一個更加有趣的話題:Utility AI(效用 AI)和 AI 動態難度調整實踐。
簡單來說,Utility AI 讓 AI 的決策不再基於"滿足 / 不滿足"的二元條件,而是基於"這個行爲有多好"的量化評分。
AI 不再問"我該不該逃跑",而是問"逃跑、進攻、躲掩體、扔手雷——哪個效用值最高"。
更重要的是,我們會討論Utility AI 在動態難度調整(DDA)中的應用——這正是現代遊戲實現"無感難度調節"的核心技術:通過量化評估玩家當前狀態,實時調整 AI 的行爲傾向、反應速度和資源分配,讓遊戲始終保持在"既不太簡單、也不太困難"的心流區間。
這種技術在《求生之路》的 AI Director、《生化危機4》的動態難度系統、以及多款現代獨立遊戲中都有成功應用。
這套思路比傳統難度分級更自然(沒有"簡單/普通/困難"的硬性切換),比固定腳本更靈活(AI 行爲隨玩家表現實時變化)——而且它的核心思想(給每個選項打分然後選最高的)其實非常直覺。
如果你對遊戲 AI 感興趣,或者正在爲自己的遊戲選擇 AI 架構,下一期內容一定不要錯過。
感謝閱讀!(๑•ㅂ•)✧
附錄:關於 AI"讀指令"的常見誤解
Tick 機制本身不區分"世界狀態變化"和"按鍵輸入"。 如果 AI 沒有感知延遲,它可以在手雷生成的同一幀做出反應——這在物理上當然不可能(信息傳遞需要時間),但在代碼層面它確實可以。這就是爲什麼有些遊戲的 AI 會讓玩家覺得"它讀了我的指令"。
"讀指令"在玩家社區裏是個更廣義的概念,不只是指 AI 直接讀取你的按鍵輸入,更指 AI 以遠超人類反應速度(<100ms)對任何可觀測的行爲做出完美反應——哪怕是彈道出現或角色起跳動作的第一幀。 不公平感的來源不一定是 AI 作弊了,更可能是它反應得太完美了,完美到不像人類 (攤手)。
真正"公平"的 AI 設計,不會讓 Tick 機制裸奔。 負責任的實現會在 AI 和環境之間加入"感知延遲"——比如 AI 的視野檢查每隔 0.2 秒才觸發一次,聽覺範圍加一個模糊半徑,讓 AI 不能"看到"牆壁後面的東西,甚至在看到玩家後先"愣"零點幾秒再反應。 這纔是"公平的挑戰"和"作弊的讀指令"之間的界線。
本文基於公開 GDC 演講和技術資料整理,不同工作室的實現細節可能有所差異。歡迎評論區交流指正,我會持續更新完善。
參考文獻
系列文章索引:
第一篇(FSM):【遊戲科普】你以爲Boss在思考?關於遊戲AI背後的有限狀態機
第二篇(行爲樹):本文
第三篇(預告):Utility AI + 混合架構實踐
Travis McIntosh. "The Last of Us: Human Enemy AI." GDC 2014. Naughty Dog. 介紹了 Hunter AI 的 Skills + Behaviours 兩層架構、視覺視錐和音頻傳感器感知系統,以及"讓角色不做蠢事"的核心設計理念。
Damian Isla. "Handling Complexity in the Halo 2 AI." GDC 2005. Bungie Studios. 介紹了《光環 2》中 Covenant 敵人的 Objective Tree(目標樹)架構,包括優先級裁決、步驟執行和行爲複用。這是樹形優先級決策結構在 3A 遊戲中的開創性應用。
Philip Dunstan & Drew Rechner. "Blending Autonomy and Control: Creating NPCs for Tom Clancy's The Division." GDC 2016. Massive Entertainment. 介紹了《全境封鎖》中 11 種 AI 模板和 5 個派閥的行爲樹實現,以及可視化編輯器和運行時調試工具的開發。
Jeff Orkin. "Three States and a Plan: The A.I. of F.E.A.R." GDC 2006. Monolith Productions. 介紹了 GOAP(Goal-Oriented Action Planning)系統在《F.E.A.R.》中的應用,包括規劃器原理、大量目標(dozens of goals)的動態選擇、以及只有三個狀態(Goto、Animate、Use Smart Object)的狀態機架構。
Laurent Couvidou & Xavier Sadoulet. "Taking Back What's Ours: The AI of Dishonored 2." GDC 2017. Arkane Studios. 介紹了《恥辱 2》中應對不可預測玩家行爲的 AI 系統,包括約 6000 條規則(GDC 原文列出 5 組數據:4609、373、596、204、246),以及小隊情報共享機制。
Ian Millington. Artificial Intelligence for Games. CRC Press, 2009. 遊戲 AI 領域的經典教材,全面介紹了 FSM、行爲樹、GOAP 等技術的理論和實踐。
Unreal Engine Documentation. "Behavior Trees." Epic Games. Unreal Engine 官方行爲樹文檔,介紹了 Blackboard、Service、Task 等核心概念以及可視化工具的使用。
更多遊戲資訊請關註:電玩幫遊戲資訊專區
電玩幫圖文攻略 www.vgover.com













